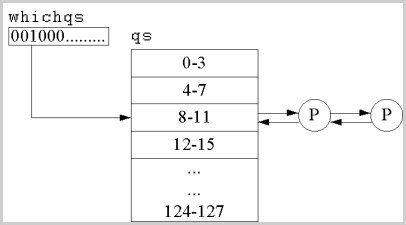
Figure 1 SVR3 Scheduler Queue
| Contents |
The scheduler must focus on two aspects:
|
Policy
|
The rules used to decide which process to run and when
to switch to another.
|
|
Implementation
|
The data structures and algorithms used to carry out these
policies.
|
However, the scheduler cannot preempt a process that is running in the kernel mode, e.g. while executing a system call. In this case, the running process might voluntarily relinquish the CPU when blocking on a resource or the scheduler can preempt the process when it returns to the user mode.
The proc structure contains the following fields that contain
priority-related information:
|
p_pri
|
Current scheduling priority
|
|
p_usrpri
|
User mode priority
|
|
p_cpu
|
Measure of recent CPU usage
|
|
p_nice
|
User controlled nice factor
|
The scheduler uses the p_pri value to decide which process to schedule. When a process is in the user mode, its p_pri and p_usrpri are identical. When a process executes a system call it transitions to the kernel mode. If the process sleeps in this mode due to the unavailability of a resource, the CPU would be given to another process. When the previous process wakes up, its p_pri is temporarily boosted in order to give preference to kernel mode processing. At this time the value of the user mode p_pri is stored in the p_usrpri field. When the process returns to the user mode, its priority is restored to the original value by replacing the p_pri value with the p_usrpri.
The kernel associates a sleep priority with every event on which a process can block. This is a kernel constant and are between the values 0 and 49. E.g. Terminal input is 28 while disk I/O is 20. When a process sleeps on the particular event and later wakes up, the value of p_pri is set to that event's sleep priority. Because the value of the sleep priority is between 0 and 49, the process gains more priority than the other user processes and gets preference for scheduling. This allows system calls to execute promptly.
The user mode priority depends on two factors:
The CPU usage, p_cpu, is the recent CPU usage of a process.
It is initialized to 0 when a process is created. At every tick, the clock
handler increments the p_cpu for the currently executing process
upto a maximum of 127. Moreover, every second, the kernel invokes a routine
called schedcpu() that reduces the p_cpu of every process
by a decay factor. The decay factor is generally 1/2 or sometimes also
dependent on the number of processes executing. E.g. BSD uses:
| decay = (2*load_average)/(2*load_average+1) |
| p_usrpri = PUSER+(p_cpu/4)+(2*p_nice) |
The scheduler maintains an array called qs of 32 run queues. Each queue corresponds to four adjacent priorities. Thus queue 0 is used for priorities 0-3, queue 1 is used for priorities 4-7 and so on. Each queue contains the head of a doubly linked list of proc structures. A global variable whichqs contains a bitmask with one bit for each queue. The bit for a queue is set if there is a process on that queue. Only runnable processes are kept in the scheduler queues. This simplifies the task of selecting a process to run.
The swtch() routine, which performs the context switch, examines the whichqs to find the index of the first set bit. This index identifies the scheduler queue containing the highest priority runnable process. swtch() removes a process from the head of the queue and switches context to it. When swtch() returns, the newly scheduled process resumes execution.
The highest priority process always runs, unless the current process is executing in the kernel mode. A process is assigned a fixed quantum, e.g. 100ms in BSD. This only affects the scheduling of the processes on the same queue. After every time quantum, the kernel invokes a routine called roundrobin() to schedule the next process from the same queue. If a higher priority process was runnable, it would be scheduled without waiting for roundrobin(). If all other runnable processes are on lower priority queues, the current process continues to run even though its quantum has expired.
There are three situations when a context switch occurs:
By default, SVR4 defines two classes:
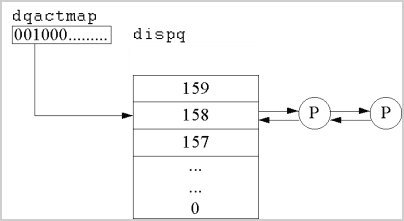
The dqactmap is a bitmap that shows which dispatch queues have at least one runnable process. Processes are placed on the queue by setfrontdq() and setbackdq(), and removed by dispdeq(). Typically, a new runnable process is placed at the back of a run queue, while a process that was preempted before its quantum expired is returned to the front of the queue.
The PREEMPT() macro checks kprunrun and calls the preempt() routine to actually preempt the process. The preempt() function invokes the CL_PREEMPT operation to perform class-dependent processing, and then calls swtch() to initiate the context switch.
swtch() calls pswtch() to perform the machine-independent part of the context switch, and then invokes lower-level assembly code to manipulate the register context, flush translation buffers, etc.
pswtch() clears the runrun and kprunrun flags, selects the highest-priority runnable process and removes it from the dispatch queue. It updates the dqactmap, and sets the state of the process to SONPROC (running on a processor). Finally, it updates the memory management registers to map the u-area and virtual address translation maps of the new process.
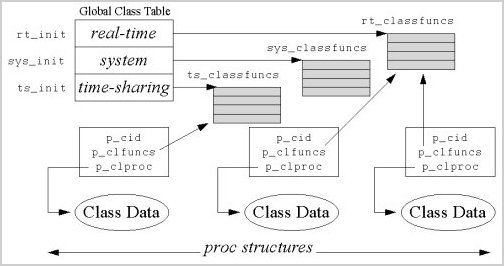
All class dependent functionality is provided by a generic interface whose virtual functions are implemented differently by each scheduling class. Figure 3 shows how the class-dependent interface is implemented. The classfuncs structure is a vector of pointers to the functions that implement the class dependent interface for any class.
A global class table contains one entry for each class. This entry has:
| p_cid | This is the class ID of the process and simply indexes into the global class table. |
| p_clfuncs | Pointer to the classfuncs vector for that class to which the process belongs. It is copied from the global class table. |
| p_clproc | Pointer to a class-dependent private data structure. |
A set of macros resolves calls to the generic interface functions and
invokes the correct class-dependent functions.
| #define CL_SLEEP(procp, clprocp, ...)\
(*(procp)->p_clfuncs->cl_sleep)(clprocp, ...) |
| 0-59 | Time-sharing class |
| 60-99 | System priorities |
| 100-159 | Real-time class |
The time slice given to a process depends on its scheduling priority. The parameter table defines the time slice for each priority. By default, the lower the priority of a process, the larger the time slice. This is done because low priority processes are scheduled after a long time thus they should get more time to execute.
The time-sharing class uses event driven scheduling instead of recomputing the priorities of all the processes every second, e.g. The scheduler penalizes a process every time it exhausts its time slice by lowering its priority. On the other hand, it boosts up the priority of a process if it blocks on an event or resource or if it takes too much time to complete its time slice.
The time-sharing class uses a struct tsproc to store class
dependent data. Its fields are:
|
ts_timeleft
|
Time remaining in quantum.
|
|
ts_cpupri
|
System part of the priority.
|
|
ts_upri
|
User part of the priority (nice value).
|
|
ts_umdpri
|
User mode priority (ts_cpupri+ ts_upri, but not more than
59).
|
|
ts_dispwait
|
Number of seconds of clock time since start of quantum.
|
When a process resumes after sleeping in the kernel, its priority is a kernel priority and is determined by the sleep condition. When it later returns to the user mode, the priority is restored from ts_umdpri. The user priority is the sum of its ts_upri and ts_cpupri, but is restricted to a value between 0 and 59. ts_upri ranges from -20 to +19 with the default value of 0. This value can be changed by the super-user by using the priocntl() call. ts_cpupri is changed according to the dispatcher parameter table.
The parameter table contains one entry for each priority in the class.
Each entry in the table contains the following fields:
|
ts_globpri
|
Global priority for the entry.
|
|
ts_quantum
|
Time quantum for this priority.
|
|
ts_tqexp
|
New ts_cpupri to set when quantum expires.
|
|
ts_slpret
|
New ts_cpupri to set when returning to user mode.
|
|
ts_maxwait
|
Number of seconds to wait for quantum expiry before using
ts_lwait.
|
|
ts_lwait
|
Use instead of ts_tqexp if process took longer than ts_maxwait
to use up its quantum.
|
|
|
|
|
|
|
|
|
1 ... 40 ... 59 |
100 ... 20 ... 10 |
0 ... 30 ... 49 |
11 ... 5 ... 5 |
5 ... 5 ... 5 |
11 ... 50 ... 59 |
If a process is already executing in kernel mode when a real-time process becomes runnable, the real-time process must wait until the current process is about to return to the user mode or until it reaches a kernel preemption point.
Only superuser processes can enter the real-time class by calling priocntl(), specifying the priority and the time quantum.
Real-time processes are characterized by a fixed priority and time quantum. The only way to change these values is by using the priocntl() system call.
The real-time dispatcher parameter table is very simple. It contains
the following two fields:
|
rt_globpri
|
Default global priority (100-159).
|
|
rt_quantum
|
Default time quantum for the priority.
|
The default parameter table assigns larger time slices for lower priorities.
The class dependent data of a real-time process is stored in a struct
rtproc, which has the following fields:
|
rt_pquantum
|
Time quantum assigned to the process.
|
|
rt_timeleft
|
Time remaining in time quantum.
|
|
rt_pri
|
Priority level of the process.
|
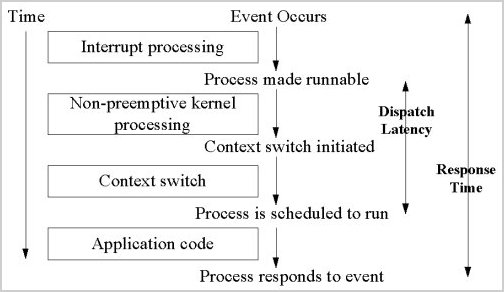
Real-time processes require bounded dispatch latency as well as bounded response time. The dispatch latency is the time between when the process becomes runnable and when it begins to run. The response time is the time between the occurrence of an event that requires the process to respond and the response itself.
When a real-time process becomes runnable, the rt_wakeup() routine, that handles the class-dependent wakeup processing, sets the kernel flag kprunrun. When the current process reaches a preemption point, it checks this flag and initiates a context switch to the waiting real-time process.