LABORATORIO DE MANUFACTURA INTEGRADA POR COMPUTADORA
CIM
El laboratorio de manufactura integrada por computadora CIM, de la Escuela Superior de Ingeniería Mecánica y Eléctrica, unidad profesional Azcapotzalco, es un laboratorio terminal destinado a los alumnos de séptimo y octavo semestres de la carrera de Ingeniería en Robótica Industrial de dicha escuela.
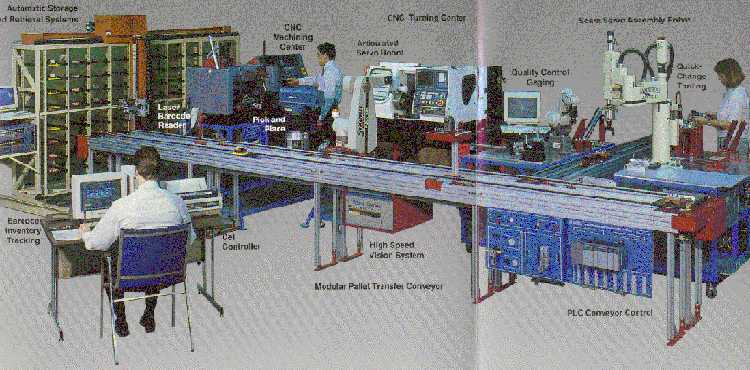
El objetivo principal de este laboratorio es el de preparar a los alumnos en la practica, en los diferentes equipos automatizados, similares a los que se encuentran en la industria, para que estos tengan un conocimiento más real para lograr un nivel más competitivo, así como brindarle un espacio a los alumnos en el cual puedan reafirmar, aplicar y desarrollar los conocimientos adquiridos en otras materias de los semestres anteriores, como son: Electricidad, electrónica digital, electrónica industrial, sistemas automatizados, lógica neumática, interfaces periféricos y programación, CNC, CAD/CAM, células de manufactura, sistemas flexibles de manufactura y robótica; Siendo estas tres últimas materias correspondientes a séptimo y octavo semestre.Este laboratorio de manufactura integrada por computadora cuenta con una computadora central, una banda transportadora CONVEYOR, un almacén AS/RS y cuatro estaciones de trabajo, siendo las dos primeras de maquinado y las dos ultimas de ensamble.
La primer estación corresponde al manipulador MERCURY el cual es un manipulador de cuatro grados de libertad montado sobre una base deslizable, la cual corresponde al quinto grado de libertad, el manipulador es impulsado por efectores neumáticos y es controlado por un controlador programable SLC 100 de Allen Bradley y una unidad de expansión de la serie 150 de Allen Bradley.
Este SLC tiene la capacidad de ser programado por medio de un teach pendant o por medio de la computadora central, además de que puede retener los programas en su memoria por un largo tiempo.
En el caso de esta estación de trabajo, tiene la cualidad especial, dentro de la célula, de ser la única que puede transferir el palet fuera de la banda transportadora CONVEYOR, para fijarlo en una estación de trabajo y pueda permitir el paso de los demás palets evitando con ello los cuellos de botella.Por su parte, el torno de CNC CYCLONE, su tarea es maquinar piezas de revolución para diferentes aplicaciones. Este torno de CNC cuenta con seis herramientas y acepta un gran número de códigos G y M, y puede realizar desde maquinados sencillos hasta maquinados complejos.
El objetivo de este manipulador es el de alimentar al torno de control numérico CYCLONE, esto es, tomar la materia prima de la banda transportadora CONVEYOR , colocarlos dentro del torno de CNC, esperar a que el torno de CNC termine su trabajo, tomar la pieza terminada del torno de CNC y colocar la pieza terminada en la banda transportadora CONVEYOR.La segunda estación es la del robot PUMA, el cual es un robot polar de brazo articulado de seis grados de libertad con servos de C.D.

El robot PUMA tiene la cualidad especial, dentro de la célula, de ser el único que tiene un controlador independiente, el cual cuenta con una unidad de memoria la cual le permite tener una gran cantidad de programas y puntos, los cuales puede utilizar indistintamente, mientras que los controladores de los otros equipos, solo pueden manejar un solo archivo de puntos y un solo programa; Además cuenta con una unidad de disco flexible, la cual le permite respaldar archivos de programas y de puntos, así como también recuperarlos.La tarea principal del robot PUMA es la de alimentar a la fresadora de CNC, tomando la materia prima de la banda transportadora CONVEYOR, depositándola en la prensa de la fresadora de CNC, que sujeta la materia prima, espera a que la fresadora de CNC termine su tarea, ya libre de la prensa la pieza terminada, la toma y la deposita nuevamente en la banda transportadora CONVEYOR.
En este caso el control de la prensa, así como el de la puerta de la fresadora de CNC, lo tiene el robot PUMA, ya que este cuenta con un módulo de entradas y salidas que le permiten comunicarse con estos equipos y algunos otros.
La fresadora de CNC TRIAC FANUC tiene como tarea el maquinado de piezas prismáticas, al igual que en el caso del torno de CNC, la fresadora de CNC cuenta con seis herramientas y acepta un gran número de códigos G y M, y puede realizar desde maquinados sencillos hasta maquinados complejos.
En el caso de esta estación, para la tarea que realiza, el robot PUMA esta sobrado, pues este robot es uno de los más versátiles que existen, y puede ser aplicado para un gran numero de tareas, desde ensamble , hasta operaciones de control de cálida, con los elementos correspondientes, pintura y soldadura, e incluso se ha aplicado en la asistencia de un cirujano en operaciones quirúrgicas ( Este campo todavía es de experimentación en nuestro país, dichas operaciones se han realizado en cerdos ). Es por esto que el robot PUMA también se utiliza para realizar programas experimentales para aplicaciones fuera de la célula de manufactura.
La tercera estación corresponde al robot MOVEMASTER, que es un robot polar de cinco grados de libertad con motores de C.D., además tiene la cualidad especial, dentro de la célula, de ser el único con un griper electrónico, que le permite controlar la velocidad de operación, así como la fuerza de sujeción. Tiene la capacidad de comunicarse con la computadora central para intercambiar archivos de puntos y de programas.
Este robot realiza el ensamble de una pequeña caja de engranes, la cual aunque no tiene una aplicación real, sirve para que los alumnos practiquen la programación de dicho robot en un proceso similar al que pueden encontrarse en la industria.
Al igual que en el caso del robot PUMA, el MOVEMASTER también puede ser aplicado en tareas que no correspondan a las que realiza dentro de la célula de manufactura y cuenta con un controlador propio que se comunica con la computadora central para intercambiar archivos de puntos de trayectorias y de programas.
La cuarta estación corresponde al robot JUPITER el cual es un robot tipo SCARA de cuatro grados de libertad con motores de C.D.. Este tipo de robot esta especialmente diseñado para realizar tareas de ensamble, además tiene la cualidad especial, dentro de la célula, de ser el único que puede cambiar de efector final automáticamente, teniendo como efectores finales a dos gripers y un atornillador neumático, cuenta con su controlador el cual requiere un disco de arranque con el programa correspondiente, pero tiene la capacidad de comunicarse con la computadora central para intercambiar archivos de puntos de trayectorias y de programas.
La tarea que realiza este robot es la de colocar los relevadores en una pequeña tarjeta electrónica, auxiliado por algunos elementos externos; Todos estos elementos externos son neumáticos y son controlados por medio de válvulas neumáticas.
La banda transportadora CONVEYOR, es un banda transportadora de materiales en proceso, la cual cuenta con una cadena de entrada y una de salida, un elemento de trasferencia, cuatro estaciones, tres dentro de la trayectoria de la banda y una fuera de ésta, así como elementos de sujeción.
La banda transportadora CONVEYOR esta controlada por un SLC 150 de Allen Bradley y una unidad de expansión de la serie 150 de Allen Bradley, Este SLC tiene la capacidad de ser programado por medio de un teach pendant o por medio de la computadora central, además de que puede retener los programas en su memoria por un largo tiempo. Este SLC es el que se encarga de recibir y mandar señales a todos los equipos para su coordinación, y puede ser controlado directamente por la computadora central.
El almacén AS/RS es un robot híbrido con un manipulador de cuatro grados de libertad, el cual cuenta con dos ejes servocontrolados y dos ejes de accionamiento neumático, cuenta con un controlador muy similar al del robot JUPITER, el cual requiere un disco de arranque con el programa correspondiente, pero tiene la capacidad de comunicarse con la computadora central para intercambiar archivos de puntos de posiciones y de programas.
La tarea principal de dicho almacén es la de proveer de materias primas o materiales a la banda transportadora CONVEYOR para que ésta las lleve a cada una de las posiciones de trabajo, y de la misma forma tome las piezas terminadas de la banda transportadora CONVEYOR y las almacene.
En el caso de la computadora central, como su nombre lo indica, es la que se encarga de controlar y de coordinar todos los programas de los equipos de la célula de manufactura, así como de tener el control de los procesos que se realizan.
Esta computadora cuenta con un software de aplicación para realizar sus tareas, que es el AMNET, con el cual se realiza la comunicación con los demás equipos, la transferencia de programas y la coordinación, además de que contiene un paquete de simulación el cual permite revisar las tareas antes de aplicarlas a la célula, de esta forma se puede conocer cual es la forma de realizar la tarea del modo más óptimo.
 |
|
Anterior |
Siguiente |
![]()
email:
otanpacheco@hotmail.com