In order to achieve a very high efficiency in robotized assembly tasks with small clearance, a new generation of advanced robot system can be proposed based on the concept of a macro/-micro-manipulator.
It consists in associating a micro-manipulator in the form of “fingers” or “wrists” to the end-effector of a macro-manipulator. This structural combination owns several advantages in its dynamic behavior.
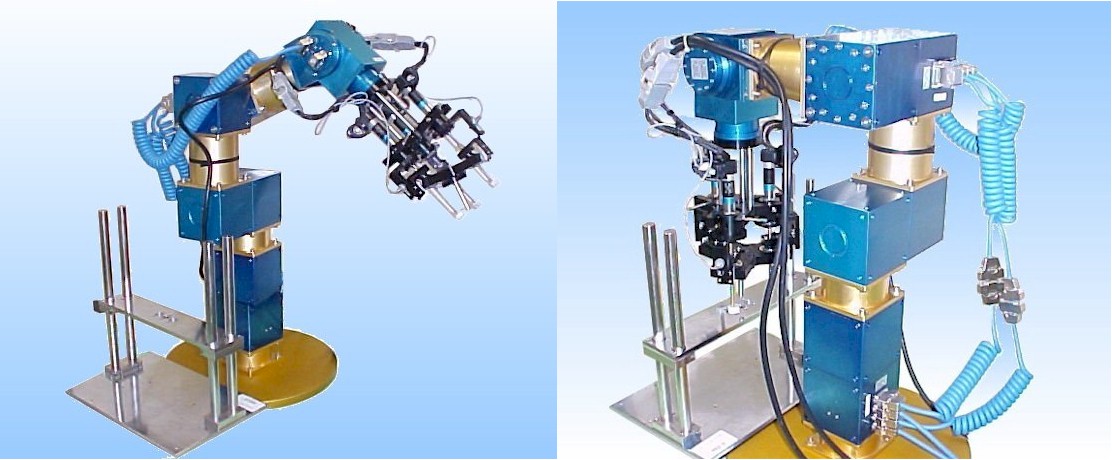
The macro-manipulator is a 5 degrees of freedom serial robot, and designed based on the modularity and reconfigurability concept.
A set of commercial grade and custom designed actuator modules, rigid connector modules and end-effector modules are considered as the basic serial robot modules
Intelligent mechatronic drives called PowerCube&trade from Amtec Germany are selected as actuator modules for rapid deployment.
Each rotary compact actuator module is a self-contained drive unit with a built-in motor, a controller, an amplifier and the communication interface, and is used in each degree of freedom.
It has a double cube design with multiple connecting sockets so that two actuator modules can be connected in many different orientations.
The rigid connector modules with various geometrical shapes and different sizes can be fabricated and used to connect joint modules through bolts.
The micro-manipulator is a 3 degree-of-freedom parallel mechanism that has been designed and fabricated in the previous project.
The target specification is given for a development of a new generation of robot manipulator where the application is limited to the peg-in-hole task with a tolerance about 10 microns.
![]()
![]()
![]()