The objective of this project is to design a biped humanoid robot that imitates human motions such as balancing and walking.
Based on a modular design concept, an anthropomorphic architecture has been adopted as a final selected design.
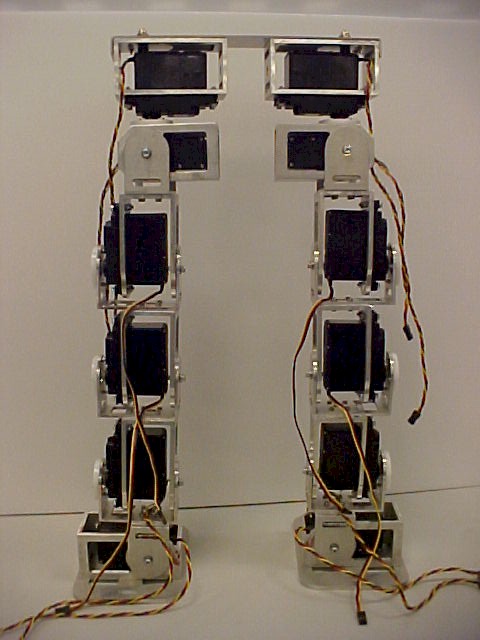
The robot is designed to have 12 degrees of freedom (6 DOFs on each leg) and consists of 12 Hitec servo motors,
which are used to control each individual degree of freedom.
It will be able to balance itself using the 12 synchronised servos.
The servos are controlled by NEC 78310a microcontroller from NP Alpha Centre.
This controller works on a DOS based Interactive Development Environment using C programming.
Although the present work has a limited scope in term of mechanical design, further work on the prototype will develop a robust controller to refine the motions more precisely.
![]()
![]()
![]()