~
Progetti ~
- powered
by JavaScript -
![]()
![]()
![]()
![]()
![]()
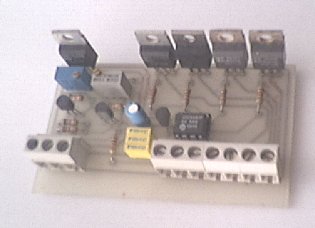
Driver per motori stepper unipolari
Questo circuito può essere utilizzato per
controllare motori passo-passo unipolari (quelli con più di 4
fili) di una certa potenza, che richiedono quindi correnti
dell'ordine dell'ampere per fase.
La sequenza di eccitazione degli avvolgimenti del motore viene
generata dall'integrato U2, un microcontroller PIC12C508 che va
programmato con il programma presente in questa stessa pagina.
Per lo scopo è possibile utilizzare il programmatore descritto
nella pagina Progetti.
Il circuito ha tre ingressi quali DIREZIONE, PASSO e RISPARMIO
CORRENTE, ingressi che possono essere direttamente controllati
dal port di un microcontroller vista la bassissima corrente
richiesta.
L'ingresso DIREZIONE determina il senso di rotazione del motore,
e ad ogni transizione L-H del piedino PASSO il motore ruota di un
passo. L'ultimo ingresso può venire utilizzato per ridurre la
corrente sulle fasi del motore quando quest'ultimo è fermo,
operazione che può risultare utile quando si utilizzano motori
da più di 200-300mA/fase. In questo caso è consigliabile
fissare i transistor di potenza su un dissipatore, isolandone
elettricamente i corpi con della mica. L'alimentazione del
circuito deve essere compresa tra 8 e 16V.
I transistor finali possono essere di diversi tipi, basta siano
NPN di potenza ed abbiano piedinatura B-C-E. TR6 deve sopportare
almeno il doppio della corrente assorbita da ciascuna fase del
motore.
Sul prototipo ho montato finali tutti differenti (materiale di
recupero...) e precisamente due TIP132, due TIP110 ed un TIP121,
e nonostante questo i risultati sono stati molto buoni.
VR1 e VR2 regolano rispettivamente la massima e la minima
corrente sulle fasi del motore, per la taratura è necessario
collegare a +5V il morsetto 1 di J3 ed agire su VR1 (regolazione
massima corrente), poi collegare il morsetto 1 di J3 a massa ed
agire su VR2 per la regolazione della minima corrente.
Se non si vuole utilizzare la regolazione in corrente si deve
collegare il comune del motore direttamente all'alimentazione
positiva del circuito, evitando di montare
R5-R6-R7-R8-R9-R10-TR5-TR6-TR7 ed anche VR1 e VR2.
![]() Listato del programma
Listato del programma
![]() Schema elettrico
Schema elettrico
![]() Master del circuito (le misure sono
100x40 mm)
Master del circuito (le misure sono
100x40 mm)
![]() Layout
Layout
This page is (always) under construction.
{kind=link}
{kind=link}
{kind=link}