 |
สเต็ปเปอร์มอเตอร์(STEPPER MOTOR)
1. การทำงานของสเต็ปเปอร์มอเตอร์
สเต็ปเปอร์มอเตอร์มีความแตกต่างจากมอเตอร์ทั่วๆไป โดยเมื่อป้อนกำลังไฟฟ้าให้กับมันๆจะหมุนเพียงล็กน้อยตามเส้นรอบวงและหยุดในขณะที่มอเตอร์ทั่วๆไปจะหมุนทันทีและหมุนตลอดเวลาตราบเท่าที่ยังมีพลังงานจ่ายให้แก่ตัวมอเตอร์ สเต็ปเปอร์มอเตอร์สามารถกำหนดตำแหน่งของการหมุนได้อย่างละเอียด โดยการใช้คอมพิวเตอร์เป็นตัวกำหนดและจัดเก็บเลขข้อมูลของการหมุนเหล่านั้นไว้
สเต็ปเปอร์มอเตอร์สามารถใช้งานในระบบเปิด(OPEN SYSTEM) นั่นคือมันสามารถทำงานได้โดยไม่ต้องการการป้อนกลับ(FEEDBACK)แต่ในการกำหนดตำแหน่งให้ถูกต้องจำเป็นที่จะต้องมีการป้อนกลับข้อมูล กลับไปยังระบบควบคุมให้รับรู้เพื่อตรวจสอบว่าตำแหน่งถูกต้องหรือเกิดการผิดพลาด(ERROR)หรือไม่วิธีหนึ่งที่ใช้กันโดยทั่วไปคือการใช้ลิมิตสวิตช์(LIMIT SWITCH)โดยติดตั้งไว้ที่ตำแหน่งที่ต้องการตรวจจับ เมื่อสเต็ปเปอร์มอเตอร์เริ่มหมุนและหมุนจนกระทั่งถึงตำแหน่งของสวิตช์ตรวจจับสัญญาณก็จะถูกป้อนกลับเข้าสู่ระบบ ทำให้ทราบการทำงานของสเต็ปเปอร์มอเตอร์ได้ตลอดเวลา ซึ่งโดยปกติในวงจรควบคุมจะมีการกำหนดจุดอ้างอิง(REFERENCE POINT)ไว้ด้วย เพื่อให้การทำงานไม่ผิดพลาด ตัวอย่างง่ายๆ เช่น ถ้าเริ่มจ่ายกำลังไฟฟ้าให้กับฟลอปปี้ดิสก์ไดรฟ์จะได้ยินเสียงของมอเตอร์กำลังเคลื่อนที่เพื่อหาจุดอ้างอิงที่กำหนด หลังจากนั้นวงจรไดรฟ์คอนโทรลเลอร์จะเริ่มทำงานได้ โดยมันจะทราบถึงทุกๆสเต็ปที่ทำการขับเคลื่อนหัวอ่าน/เขียนไปยังแต่ละแทร็กบนดิสก์
เช่นเดียวกับมอเตอร์ทั่วไป การที่จะทำให้เกิดการหมุนของโรเตอร์(ROTOR)ได้ต้องมีการกระทำของสนามแม่เหล็กที่เกิดขึ้นระหว่างโรเตอร์และสเตเตอร์(STATOR) ซึ่งขึ้นอยู่กับการจัดวางขั้วแม่เหล็ก(POLE) การหมุนทำได้แบบทั้งต่อเนื่องและกลับทิศทางไปมาโดยกระบวนการทางไฟสลับ,การจัดวางแปลงถ่าน,การจัดแยกคอมมิวเตเตอร์ และการทำการสวิตชิ่งพลังงานไฟฟ้าเพื่อให้เกิดแรงดึงดูดของแม่เหล็ก( MAGNETIC ATTRACTUON )ที่ขั้วแม่เหล็กสร้างและหยุดสลับกัน ผลก็คือเกิดสนามแม่เหล็กเกิดบนสเตเตอร์โดยการจ่ายกำลังไฟฟ้าทีละคู่ของขั้วแม่เหล็กในทิศทางตรงกันข้ามไปตลอดเวลา และเมื่อต้องการให้หยุดหมุนทำได้โดยการหยุดการเกิดขั้วแม่เหล็กที่จุดหนึ่งโดยหยุดการสวิตชิ่งในลำดับต่อไปเสีย การหมุนกลับทิศทางก็ทำได้เช่นเดียวกับที่กล่าวมาแล้วเพียงแต่ทำการสวิตชิ่งกำลังไฟฟ้าให้เกิดสนามแม่เหล็กหมุนในทิศทางกลับกัน หรือกลับลำดับการสวิตช์ของมัน
โครงสร้างของขั้วแม่เหล็กบนสเตเตอร์ประกอบขึ้นจากแผ่นเหล็กวงแหวนที่มีซี่ยื่นออกมา แต่ละซี่เหล่านั้นจะมีคอยล์พันสวมอยู่ ดังนั้นเมื่อป้อนกระแสไฟฟ้าผ่านคอยล์ทำให้เกิดสนามแม่เหล็กไฟฟ้าขึ้นด้านตรงข้ามของขั้วแม่เหล็กจะได้รับกระแสไฟฟ้าในเวลาเดียวกันแต่ว่าจะไหลวนในทิศทางตรงกันข้ามดังแสดงในรูปที่ 2.5(ก) ดังนั้นถ้าเพิ่มจำนวนของขั้วแม่เหล็กมากขึ้นจะเป็นการเพิ่มจำนวนของสเต็ปต่อรอบมากขึ้นตามไปด้วย
อย่างไรก็ตามผู้ใช้งานสามารถเพิ่มจำนวนของสเต็ปได้อีกวิธีหนึ่งโดยไม่ต้องปรับเปลี่ยนโครงสร้างภายในโดยทำการจ่ายกำลังไฟฟ้าไปยังขั้วแม่เหล็ก 2 ขั้วที่อยู่ใกล้กันในเวลาเดียวกัน ซึ่งจะทำให้โรเตอร์หยุดหมุนอยู่ระหว่างกลางของ 2 ขั้วแม่เหล็กนั้น หรือเคลื่อนที่ไปครึ่งสเต็ปเท่านั้นและวิธีการนี้ยังช่วยให้เกิดแรงบิด(TORQUE)มากขึ้นด้วย ดังแสดงในรูปที่ 2.5(ข)

รูปที่ 2.5 (ก) แสดงสเต็ปเปอร์มอเตอร์ที่มีการต่อวงจรขดลวดภายในเพื่อกระตุ้นให้เกิดขั้วแม่เหล็ก
1ขั้วในทิศทางตรงกันข้าม ส่วนขดลวดอื่นๆจะไม่ถูกกระตุ้นเลย

รูปที่ 2.5(ข) แสดงการต่อวงจรขดลวดแบบกระตุ้นให้เกิดขั้วแม่เหล็กพร้อมกัน 2 ขั้วที่อยู่ใกล้กัน
ทำให้โรเตอร์เคลื่อนที่มาหยุดอยู่ระหว่างขั้วแม่เหล็กทั้งสอง
สเต็ปเปอร์มอเตอร์โดยทั่วไปมีจำนวนของขั้วแม่เหล็กหรือจำนวนสเต็ปต่อรอบเป็นจำนวนมาก ปกติอยู่ที่ประมาณ 100-400 สเต็ปต่อรอบ การมีจำนวนสเต็ปมากๆนี้ไม่ได้เพิ่มที่จำนวนขั้วแม่เหล็กไฟฟ้าที่สเตเตอร์ แต่ทำได้โดยเพิ่มจำนวนซี่ขั้วแม่เหล็กที่โรเตอร์ จำนวนสเต็ปต่อรอบทั้งหมดจะได้จากการคูณจำนวนขั้วแม่เหล็กบนสเตเตอร์และจำนวนซี่ที่โรเตอร์ ดังเช่น ถ้ามีขั้วแม่เหล็ก 3 ขั้วบนสเตเตอร์ และ 8 ซี่ขั้วแม่เหล็กบนโรเตอร์ สเต็ปเปอร์มอเตอร์ตัวนี้จะทำงานที่ 24 สเต็ปต่อรอบหรือหมุนเป็นมุม 15 องศาต่อสเต็ป[7]
การใช้วงจรดิจิตอลคอนโทรลเลอร์กำหนดการจ่ายกำลังไฟฟ้าเข้าสู่ขดลวดบนสเตเตอร์แบบซีเควนเชียลทำให้สามารถควบคุมการเคลื่อนที่ทุกสเต็ปได้ เช่นเดียวกับการควบคุมวงจรดีซีเซอร์โว (DC SERVO) แต่การควบคุมด้วยดิจิตอลไม่จำเป็นต้องมีการป้อนกลับ การเคลื่อนที่ทุกเต็ปได้จากการคำนวณจำนวนรอบหรือมุมในการหมุนที่ต้องการ แล้วจึงส่งข้อมูลที่ได้ไปควบคุมการหมุนของมอเตอร์ อาทิ ความเร็ว,มุมในการเคลื่อนที่,ตำแหน่งของเพลาถูกกำหนดจากข้อมูลที่ส่งมาควบคุม
2. ชนิดของสเต็ปเปอร์มอเตอร์
สเต็ปเปอร์มอเตอร์แบ่งตามพื้นฐานได้เป็น 3 ชนิด คือ วาริเอเบิลรีลักแตนซ์(VARIABLE RELUCTANCE :VR), เพอร์มาเนนต์แม็กเนต(PERMANANT MAGNET :PM) และแบบไฮบริด (HYBRID)
ชนิดวาริเอเบิลรีลักแตนซ์มีโครงสร้างของโรเตอร์แบบมัลติทูธ(MULTI-TOOTH) ทำจากเหล็กอ่อน การทดสอบเพื่อให้ทราบว่าเป็นมอเตอร์ชนิดนี้ทำได้ง่ายมากคือ ใช้นิ้วหมุนเพลาของมอเตอร์ มอเตอร์ชนิดนี้ที่โรเตอร์จะไม่เกิดปรากฏการณ์ทางแม่เหล็ก(MAGNETISM) มันจึงหมุนได้ตลอดโดยไม่ติดขัด แตกต่างจากชนิด PM และชนิดไฮบริดซึ่งมีสนามแม่เหล็กที่โรเตอร์ เมื่อหมุนจะรู้สึกขัดๆเหมือนเป็นฟันเฟือง สเต็ปเปอร์มอเตอร์ชนิดนี้มีจุดด้อยในเรื่องของความถูกต้องของตำแหน่งและทำงานได้ไม่ดีนักเมื่อมีสเต็ปในการหมุนสูง
ชนิดเพอร์มาเนนต์แม็กเนตมีโครงสร้างของโรเตอร์แบบเรียบไม่มีซี่ขั้วแม่เหล็ก บนโรเตอร์จะเป็นแบบแม่เหล็กถาวรการควบคุมทำได้โดยป้อนกระแสกระตุ้นที่ขดลวดบนสเตเตอร์ ยกตัวอย่างถ้าเป็นสเตเตอร์แบบ 4 เฟส จะมีขั้วแม่เหล็กอยู่ 4 ขั้ว ซึ่งมีคอยล์พันอยู่แยกจากกัน ขั้วแม่เหล็กถาวรบนโรเตอร์จะถูกแรงดึงดูดจากขั้วแม่เหล็กบนสเตเตอร์นั้นถึงแม้ว่าจะไม่ป้อนกระแสไฟฟ้าอีกต่อไป ทำให้เกิดเป็นแรงยึดหน่วงขึ้น สเต็ปเปอร์มอเตอร์ชนิดนี้มีข้อดีในเรื่องของความถูกต้องของตำแหน่งเมื่อเปรียบเทียบกับชนิดอื่น
ชนิดไฮบริดเป็นชนิดที่นิยมใช้งานกันมากที่สุด โดยเฉพาะนำมาใช้ในอุปกรณ์ที่ใช้ในเครื่องคอมพิวเตอร์ สเต็ปเปอร์มอเตอร์ชนิดนี้มีโครงสร้างภายในคือ สเตเตอร์เป็นชนิดวาริเอเบิลรี-ลักแตนซ์ ส่วนโรเตอร์เป็นชนิดเพอร์มาเนนต์แม็กเนตนำมาประกอบเข้าด้วยกัน จึงทำให้เป็นมอเตอร์ชนิดที่มีแรงยึดหน่วงสูง มีแรงบิดดึงและผลักดี และยังคงทำงานได้ดีแม้ว่าจะมีจำนวนของสเต็ปต่อรอบในการหมุนสูงก็ตาม
ยังมีสเต็ปเปอร์มอเตอร์แบบใหม่อีกชนิดหนึ่งเป็นชนิดที่ปรับปรุงมาจากชนิดเพอร์มา-เนนต์แม็กเนตนั่นคือ ชนิดแรเอิร์ทเพอร์มาเนนต์แม็กเนต( RARE EARTH PERMANANT MAGNET ) หรือที่เรียกกันว่าชนิดดิสก์แมกเน็ตสเต็ปเปอร์มอเตอร์(DISC MAGNET STEPPERS)ซึ่งโครงสร้างของโรเตอร์ของมอเตอร์ชนิดนี้มีลักษณะเป็นแผ่นซึ่งยึดกับเพลาของมอเตอร์ การทำงานของมอเตอร์ยังคงเป็นเช่นเดิม แต่ด้วยโครงสร้างแบบใหม่นี้ช่วยทำให้เกิดโมเมนต์ของความเฉื่อยต่ำมาก,มีอัตราเร่งสูง มอเตอร์ชนิดนี้จึงจัดเป็นมอเตอร์ที่มีประสิทธิภาพสูงทั้งในด้านแรงบิดดึง,กำลังทางกลที่ได้ของมอเตอร์,ความถูกต้องของตำแหน่งสูงมาก และความเร็วในการเริ่มหมุนและหยุดสูงอีกทั้งยังมีความสูญเสียของกำลังงานต่ำ
การพันขดลวดหรือคอยล์บนสเต็ปเปอร์มอเตอร์มีอยู่ 2 วิธีคือ แบบไบโพลาร์(BIPOLAR) และแบบยูนิโพลาร์(UNIPOLAR) ดังแสดงในรูปที่ 2.6

รูปที่ 2.6 แสดงการพันขดลวดบนสเต็ปเปอร์มอเตอร์ในลักษณะต่างๆ ทางซ้ายเป็นแบบไบโพลาร์
ส่วนที่เหลือเป็นแบบยูนิโพลาร์
สเต็ปเปอร์มอเตอร์แบบไบโพลาร์มีการพันขดลวด 1 ขด บนแต่ละขั้วแม่เหล็กของสเตเตอร์ ขั้วแม่เหล็กที่เกิดขึ้นบนสเตเตอร์ถูกกำหนดโดยทิศทางของกระแสไฟฟ้า และสามารถทำให้เกิดขั้วแม่เหล็กในทิศทางตรงกันข้ามได้โดยการกลับทิศทางการไหลของกระแสไฟฟ้า ซึ่งการกำหนดทิศทางการไหลและการกลับทิศทางของกระแสไฟฟ้าทำได้ โดยการใช้วงจรสวิตชิ่งกลับขั้วไฟฟ้า
สำหรับยูนิโพลาร์จะมีการพันขดลวด 2 ขดบนแต่ละขั้วแม่เหล็กของสเตเตอร์ ซึ่งแต่ละขดจะทำให้เกิดขั้วแม่เหล็กเปลี่ยนไปมาทำได้โดยการสวิตชิ่งกระแสไฟฟ้าจากขดลวดขดหนึ่งไปยังอีกขดหนึ่งเท่านั้น โดยปกติขดลวดทั้งสองจะมีการเชื่อมต่อกันหรือมีจุดร่วมเพื่อลดจำนวนของสายไฟที่ต่อจากมอเตอร์ วงจรจ่ายกำลังไฟฟ้าของมอเตอร์แบบยูนิโพลาร์ทำได้ง่ายกว่าชนิดไบโพลาร์เพราะมันต้องการเพียงสวิตช์ธรรมดาในการเปิดและปิดกำลังไฟฟ้าให้กับขดลวดบนสเตเตอร์ในทิศทางที่ต้องการให้หมุนได้ทันที รูปที่ 2.7 แสดงวงจรจ่ายกำลังไฟฟ้าซึ่งใช้ทรานซิสเตอร์ทำหน้าที่เป็นตัวสวิตชิ่งให้กับสเต็ปเปอร์มอเตอร์ที่มีการพันขดลวดทั้ง 2 แบบ จะเห็นได้ว่าในแบบของยูนิโพลาร์เป็นวงจรที่ง่ายและไม่มีความซับซ้อนเลย
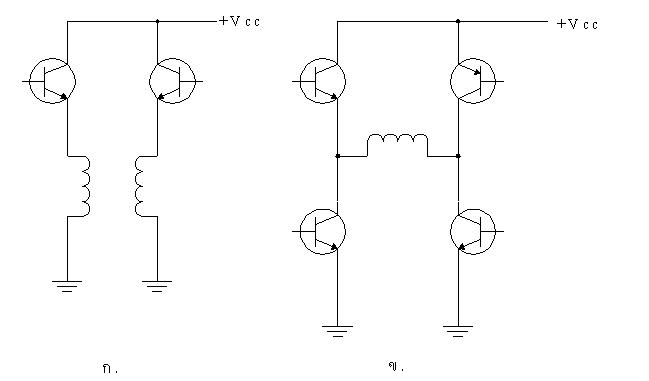
รูปที่ 2.7 แสดงตัวอย่างวงจรจ่ายกำลังไฟฟ้าให้แก่สเต็ปเปอร์มอเตอร์
(ก)สำหรับมอเตอร์แบบยูนิโพลาร์
(ข)สำหรับมอเตอร์แบบไบโพลาร์
อย่างไรก็ตามการพันขดลวดแบบยูนิโพลาร์ก็มีจุดด้อยตรงที่การพันแบบนี้จะทำให้เกิดแรงบิดน้อยกว่าแบบไบโพลาร์ ทั้งนี้เพราะจะมีเพียงครึ่งหนึ่งของขดลวดที่ถูกกระตุ้นให้ทำงานเท่านั้นในระยะเวลาหนึ่ง
การพิจารณาว่าสเต็ปเปอร์มอเตอร์ตัวใดมีการพันขดลวดแบบใดสังเกตได้ง่ายโดยถ้าเป็นแบบไบโพลาร์จะมีสายไฟต่อออกจากมอเตอร์เพียง 4 สาย และถ้าเป็นแบบยูนิโพลาร์จะมี 5 หรือ 6 สาย หรือทราบได้โดยการอ่านจากป้าย( NAME PLATE) ที่ติดอยู่กับมอเตอร์ก็ได้
3. การกระตุ้นและควบคุมการหมุนของสเต็ปเปอร์มอเตอร์
การกระตุ้นและควบคุมการหมุนของมอเตอร์ให้เคลื่อนที่ไปแต่ละสเต็ปทำได้โดยจ่ายกำลังไฟฟ้าไปยังขดลวดแต่ละขดบนสเตเตอร์ซึ่งต้องป้อนเป็นแบบซีเควนเชียลในรูปแบบที่ถูกต้องโดยแบ่งออกได้เป็น 3 รูปแบบคือ แบบเวฟ(WAVE), แบบ 2 เฟส( TWO PHESE) และแบบครึ่งสเต็ป( HALF STEP) ทั้ง 3 แบบต่างก็มีข้อดีและข้อเสียแตกต่างกันออกไป
แบบเวฟเป็นการกระตุ้นรูปแบบที่ง่ายที่สุด โดยทำการกระตุ้นขดลวดทีละขดในเวลาหนึ่งและเรียงถัดกันไป ดังเช่น ขดที่ 1,2,3,4,1 หรือ 1,4,3,2,1 ขึ้นอยู่กับทิศทางที่ต้องการให้หมุน ดังนั้นจึงมีขดลวดเพียงขดเดียวในเวลาหนึ่งที่ถูกกระตุ้นเท่านั้น วงจรกระตุ้นแบบเวฟจึงมีราคาถูกและง่าย ขั้นตอนการทำงานต่างๆแสดงดังในตารางที่ 2.1
ตารางที่ 2.1 แสดงลำดับการกระตุ้นเพื่อให้สเต็ปเปอร์มอเตอร์ทำงานด้วยการกระตุ้นแบบเวฟ
| สเต็ปที่ | เฟสที่1 | เฟสที่2 | เฟสที่3 | เฟสที่4 |
| 1 | ทำงาน | - | - | - |
| 2 | - | ทำงาน | - | - |
| 3 | - | - | ทำงาน | - |
| 4 | - | - | - | ทำงาน |
แบบ 2 เฟส มีลักษณะคล้ายแบบเวฟ แต่การกระตุ้นแบบนี้จะทำการกระตุ้นโดยจ่ายกำลังไฟฟ้าไปที่ขดลวด 2 ขดที่อยู่ใกล้กันในเวลาเดียวกัน และเรียงถัดกันไปเช่นเดียวกับแบบเวฟคือ เริ่มจากขดลวด 1-2,2-3,3-4,4-1,1-2 หรือ 1-4,4-3,3-2,2-1,1-4 ขึ้นอยู่กับทิศทางการหมุน การเพิ่มจำนวนของขดลวดที่ถูกกระตุ้นนี้ทำให้เพิ่มแรงบิดได้มากกว่าแบบเวฟ โรเตอร์จะเคลื่อนที่ด้วยแรงดึงอย่างเต็มแรงจาก 2 ขดลวดที่ถูกกระตุ้นพร้อมกัน และต่อไปด้วยแรงดึงจากอีก 2 ขดลวดถัดไป สำหรับข้อเสียก็คือการกระตุ้นแบบนี้ต้องใช้แหล่งจ่ายกำลังไฟฟ้ามากขึ้น ขั้นตอนการทำงานต่างๆแสดงดังตารางที่ 2.2
ตารางที่ 2.2 แสดงลำดับการกระตุ้นเพื่อให้สเต็ปเปอร์มอเตอร์ทำงานด้วยการกระตุ้นแบบ 2 เฟส
| สเต็ปที่ | เฟสที่1 | เฟสที่2 | เฟสที่3 | เฟสที่4 |
| 1 | ทำงาน | ทำงาน | - | - |
| 2 | - | ทำงาน | ทำงาน | - |
| 3 | - | - | ทำงาน | ทำงาน |
| 4 | ทำงาน | - | - | ทำงาน |
แบบครึ่งสเต็ปเป็นรูปแบบที่เกิดจากการผสมผสานระหว่างการกระตุ้นแบบเวฟและแบบ 2 เฟสเพื่อเพิ่มจำนวนของสเต็ปต่อรอบอีกเท่าตัวหนึ่ง ในระบบนี้จะทำการกระตุ้นขดลวดเรียงกันไปเป็นลำดับดังนี้ ขดลวดที่ถูกกระตุ้น 1, 1-2, 2, 2-3, 3, 3-4, 4, 4-1, 1 แรงบิดที่ได้จากการกระตุ้นแบบนี้จะเพิ่มมากขึ้นอีกเพราะช่วงสเต็ปมีระยะสั้นลง และแต่ละสเต็ปเกิดแรงดึงจากขดลวด 2 ขดที่ถูกกระตุ้นพร้อมกัน ความถูกต้องของตำแหน่งมีเพิ่มมากขึ้น แต่ต้องพึงระวังไว้อีกประการหนึ่งว่าเมื่อกระตุ้นให้ทำงานในรูปแบบนี้จะต้องทำการหมุนถึง 2 สเต็ปจึงจะทำการหมุนเท่ากับ 1 สเต็ปเต็มเหมือนกับในการควบคุม 2 แบบแรก สำหรับแหล่งจ่ายกำลังไฟฟ้าต้องใช้เทียบเท่าแบบ 2 เฟสจึงจะเพียงพอ ขั้นตอนการทำงานต่างๆดังแสดงในตารางที่ 2.3
ตารางที่ 2.3 แสดงลำดับการกระตุ้นเพื่อให้สเต็ปเปอร์มอเตอร์ทำงานด้วยการกระตุ้นแบบครึ่งสเต็ป
| สเต็ปที่ | เฟสที่1 | เฟสที่2 | เฟสที่3 | เฟสที่4 |
| 1 | ทำงาน | - | - | - |
| 2 | ทำงาน | ทำงาน | - | - |
| 3 | - | ทำงาน | - | - |
| 4 | - | ทำงาน | ทำงาน | - |
| 5 | - | - | ทำงาน | - |
| 6 | - | - | ทำงาน | ทำงาน |
| 7 | - | - | - | ทำงาน |
| 8 | ทำงาน | - | - | ทำงาน |
|
|
