| Following the Line Follower |
|
|
Line following is something
that all good robots are expected to do. Most robots using a single
light sensor are actually programmed to follow the left edge of the
line. Diagrams often show the idealized zigzag path that the robot is
supposed to take.
I was curious to see the actual paths the robot is taking so I stuck a
felt pen to the front of the light sensor. I tried with bots
using a single light sensor as well as one equipped with 2 light
sensors. |

|
| Well I could not have the robot messing up
my test pads or playing fields. What I did was to photocopy a portion
of the playing field and make the robot run on the photocopies. Non-permanent
ink felt pens were used and the floor was protected with ample pieces
of old newspapers. |
| These are un-retouched scans of the
tracings so some parts may be a bit faint. But they do show the way
the robot is moving. Here are some of the patterns that emerged as the
robot traced its path while following a line. The small arrows show the direction the robot is
traveling. |
| |
|
| Line Following Bot with single light sensor in the
centre |
|
|
|
|
|
|
 |
 |
|
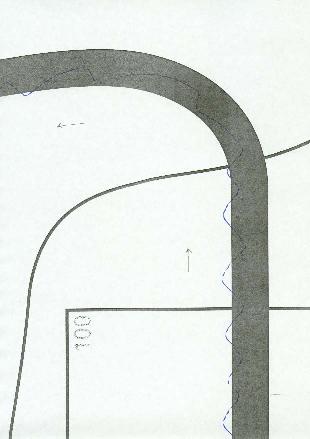
Smooth curve - clockwise |
Smooth curve - anticlockwise
|
| The bot has no problem negotiating a smooth
curve in either direction |
| |
|
 |
 |
|
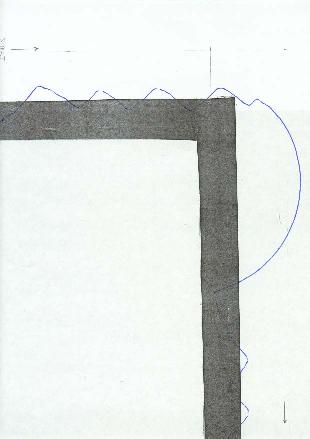
Rounded 90 deg bend - clockwise |
Rounded 90 deg bend - anticlockwise |
| No problem with a rounded 90 degree bend |
| |
|
 |
 |
|
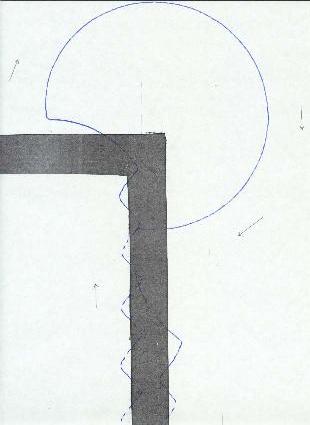
Sharp 90 deg bend - clockwise |
Sharp 90 deg bend - anticlockwise |
|
| The bot is able to go round the outer edge of a sharp 90
deg bend. |
However, it fails to negotiate the inner edge of the
sharp 90 deg bend. Instead it turns around and latches
on to follow the opposite outer edge of the line. |
|
|
|
Results with 2 light sensors |
|
|
|
|