| Line Following Bot with 2 light sensors |
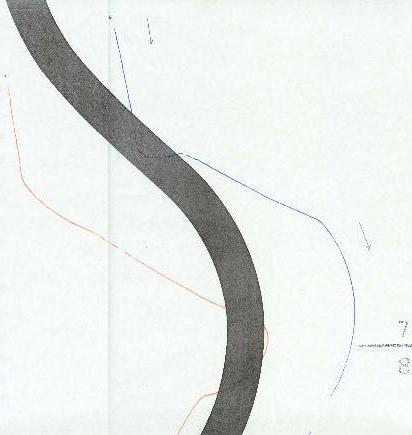
| Line following is much simpler if the bot
is fitted with 2 light sensors, placed one on each side of the line. Here are the tracings made with a
line follower that uses 2 light sensors. |
| |
|
|
|
Smooth curve - clockwise
|
| |
|
|
|
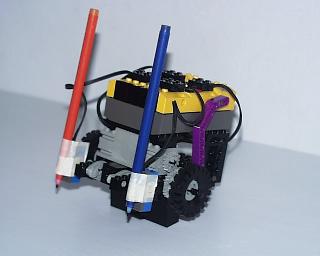
A felt pen is stuck to each of the two light sensors to generate the
tracings on this page. (Note: the bot is propped up by some
of the black 2x8 bricks from the earlier RIS 1.0 sets). |
 |
|
|
Smooth curve - anticlockwise
|
| The bot has no problem negotiating a smooth
curve in either direction |
| |
|
 |
 |
|
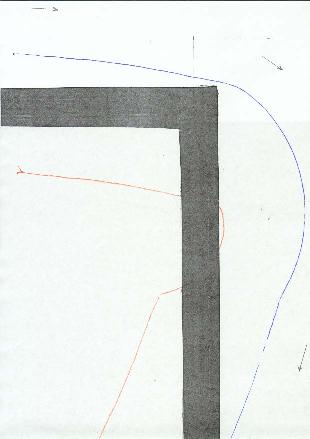
Rounded 90 deg bend - clockwise |
Rounded 90 deg bend - anticlockwise |
|
No problem with a rounded 90 degree bend both
directions |
| |
|
 |
 |
|
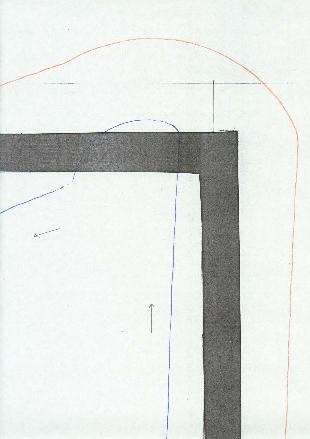
Sharp 90 deg bend - clockwise |
Sharp 90 deg bend - anticlockwise |
| And here is how the bot with 2 light sensors is able to
glide round
a sharp 90
degree bend in either direction. |
| |
| Conclusion |
| This method of actually tracing the bot's
path can be used for comparing different mechanical designs of line following bots and for comparing different line following programs.
It gives an objective way to decide whether the fine tuning (such as threshold light values) you have made on your bot has an effect on its performance - important when you are preparing for competitive challenges. |
| A line follower using a single light sensor
in the center will not be able to negotiate a sharp 90 degree bend in both
directions (clockwise and anticlockwise). However, if you offset the
light sensor to one side of the center, the bot will now be able to wiggle its way round the sharp 90-degree bend in both directions.
Thanks to Steve
Hassenplug, who has won many line following contests,
for the idea. |
| Of course, line following is much simpler
if you use two light sensors. Thankfully, in many competitive challenges,
you are allowed to use up to 2 light sensors on your robot. So you
should make full use of them. |
| |
|
| Results with single light
sensor |
|