
Welcome to my robotics page. This will see constant future expansion. For now, I'll have images of my robots. Eventualy, each link to each seprate robot, will include schematics, board layouts, and other info including more detailed pictures. I'll also have sections below pertaining specificly to drivers, Nv's, and other things like that, as well as my plans for future robots.

BORIS, my Muscle wire based robot
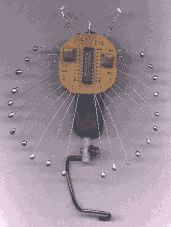
 Info and construction of my Solar BEAM Robots
Info and construction of my Solar BEAM Robots
 Info and construction of the Floor Monkey
Info and construction of the Floor Monkey
Info and construction of MECI IV M

Info and construction of Quadrapod (Challenger Series I)
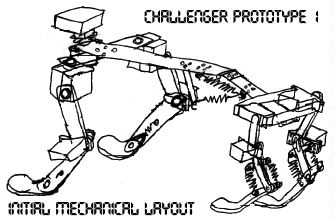
my first drawing of the plans for Challenger I.

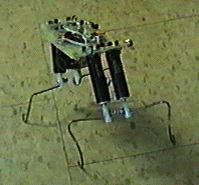
the frame I built for Challenger I (unfinnished)
Challenger is named appropriately. It's going to be very complex. I've got some stuff on it in the news section, but I'm not repeating it here (I'm getting tired of typing! :) Anyway, the frame was built, but I don't have any motors strong enough to operate it. I may simply start from scratch. The frame shown uses 9 motors. I was going to redo the frame and use different legs, and have it use 12 servos, however i reduced it to 8 servos. The legs are going to be different, but I may be able to do it. It might actualy be like the drawing, but not nearly as big. I'll use small materials, make a Robo-Cat or something. I was originaly going to do a pair of challenger bots, and I might yet do this. Fe-Line and K-9... Maybe? I'm also doing a 4 legged version of the Lynxmotion hexapod walker kit. Someday I'd like to do an MIT Attila style robot.
I'm also doing a 3, 4, and 5 motor walker. I'm trying a different layout for my second 4 motor walker. It's the same as my three motor walker , but more motion. The 5 motor walker should be the same, but have a waist motor for turning the robot along a radius.
Some of the more exotic robots (aside from the very complex challenger series), will be a head that looks at and follows light, a robotic snake called Roboa-constrictor, possibly a scorpion, and also a robotic fish (yes, you heard me say fish! :)
Schematics and board layouts
I'll be posting my H-Bridge circuit board layouts, microcore layouts, and several of my custom boards, as well as schematics. This will come in the future, when I hook my scanner up to my computer again and have time. I'll draw the stuff first so it can be scanned. I may also include detailed instructions on a future 2 motor walker (similar to the Zoellen walker, but I'm doing it from my designs). I'll also have a instructions for my 3, 4, and 5 motor walkers, as well as diagrams for recreating the legs on the hexapod walker from lynxmotion (cheaper to build a hacked version than pay $375 for it!!! It's completely legal too, since I don't have a Lynxmotion walker and won't be following their measurements). I'll have details on servo modifications and mounting legs to them, as well as some various mechanical layouts to carry out different tasks.
| E-Mail me at: richfile@rconnect.com | The Richfiles TI Graphing Calculator Page |
| The Richfiles Model Building Page | About me! ( : |

