新版發表----Working Model
4D&V6 新版發表----Working Model
4D&V6
|
|

|
|
動態模擬 |
機構運動分析 |
|

|
動態模擬分析 |
有限元素分析 |

|

|
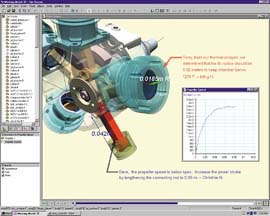
 Radial Piston Air Motor Radial Piston Air Motor
|
Life Fitness |

|

|
2D桿件受力分析 |
零件加工裝配模擬 |
|
 MSC公司為擴展對客戶服務的領域,並為客戶提供更完整的電腦輔助工程解決方案,於1998年12月併購了在機構分析軟體與技術位居領先第地位的Knowledge Revolution (KR)公司,所以原先KR公司的軟體也將由MSC台灣分公司正式引進國內,讓機構模擬分析軟體的需求者也能享受到世界水準的技術支援與服務。在此我們將為各位介紹KR的主力產品Work Model 3D。 MSC公司為擴展對客戶服務的領域,並為客戶提供更完整的電腦輔助工程解決方案,於1998年12月併購了在機構分析軟體與技術位居領先第地位的Knowledge Revolution (KR)公司,所以原先KR公司的軟體也將由MSC台灣分公司正式引進國內,讓機構模擬分析軟體的需求者也能享受到世界水準的技術支援與服務。在此我們將為各位介紹KR的主力產品Work Model 3D。 |
|
| Working Model 3D的出現為PC級的機構運動模擬軟體樹立了新的基準,它對機械的組裝與機構提供完整的運動(kinematic)和動力(dynamic)行為的分析模擬能力,目前已有數以千計的用戶成功的用它來做產品組裝的可行性檢查、產品機構行為的確認、機械或車輛性能的驗證、生產流程的的設計…..。 |
|
| Working Model 3D除了保有Windows界面軟體易學、易用的特性之外,同時卻又擁有各種運動與機構模擬的強大功能。利用Working Model 3D,使用者可將CAD模型直接轉換成擬真的機構模型,模擬像是滾動(roll)、彈跳(bounce)、滑動(slide)、擺動(wiggle)與碰撞(collide)等行為。它讓你可以在實際的原型(或模型)製作之前,在電腦上找出設計的盲點或做產品設計之改善,以往需要幾週或幾月去解決的複雜機構問題,可以在幾小時或幾天內就輕易解決,大幅縮短了整個產品開發時程。 |
|
 |
|
| 茲將Working Model 3D主要的功能特性歸納如下: |
|
 單位系統與公式 單位系統與公式 |
|
在單位系統上提供四種選擇:
內部的運算公式可隨單位系統的切換做自動轉換,並提供完整數學函數與工具以滿足顧客化的需求。 |
|
| 與CAD軟體之整合 |
|
針對範圍廣泛的 CAD軟體提供兩種整合方式:
對 Pro/ENGINEER、SolidWorks、Mechanical Desktop與Solid Edge等軟體,利用獨特的自動拘束映射(Automatic
Constraint Mapping,簡稱ACM)技術,可自動將CAD組裝(assemble)模型自動轉換成機構運動模型。
對其他軟體則可利用 STL、DXF(AUTOCAD)、或SAT(ACIS)格式來作轉換。 |
|
物理性質與組件 |
|
可定義的組件 (body)性質包括:質量、密度、體積、幾何、質心(center
of mass)、慣性矩(moment of inertia)、位置與方位(orientation)、速度與角速度、和恢復(restitution)係數與模擦係數。
在繪圖顯示上可用 ”向量(vector)”記號來觀察速度或角速度、加速度或角加速度、與力(force)或扭矩(torque)的大小和方向。
對個別組件而言:可追蹤組件的運動路徑並模擬組件間彼此的穿透或碰撞行為;同時除了通用的物理定律外,可以用使用者定義的公式或表格的方式去定義某組件的運動行為 (稱之為Prescribed Motion),然後去預測其他組件的運動行為表現。 |
|
拘束條件(Constraints) |
|
提供完整的拘束條件定義,足以應付組件間的不同相對行為,包括:
- Rigid、revolute、與spherical
joint
- Rigid、revolute、與spherical
slot joint
- Rigid、revolute、與spherical
planar joint
- Parallel joint
- Rod
- Rope
- Separator
- Linear與revolute spring/damper
- Generic joint (user defined constraints)
不論是拘束條件或是驅動源 (driver)均可以用表格或方程式的方式輸入,同時對組件在關節(joint)間的相對行為可定義上下極限值。並提供”Constraint
Navigator”工具以方便使用者驗證或修改拘束條件之定義。 |
|
| 運動驅動源(Motion Drivers) |
|
提供的運動驅動源包括:
- Motor
- Actuator
- Force
- Torque
提供 interactive
sliders以模擬即時的驅動源輸入。而在求解的積分上提供Euler與Kutta-Merson兩種方法,積分時可選擇固定或可變的時間步長(time
step),並提供調整參數以控制求解的精確度。
模擬時可以考慮或忽略重力場的影響,並調整重力的大小及方向。
提供 run、stop、reset、single step與pause等指令以便觀察不同時間點的運動行為。 |
|
| 可量測參數(Measurable Parameter ) |
|
提供的分析結果包括:
- Position
- Velocity
- Acceleration
- Linear Momentum
- Orientation
- Angular velocity
- Angular acceleration
- Constraints tension、length、displacement、force和torque
- Contact force
- Contact impulse
- Friction force
可在任何拘束條件、零件或是點上輸出以上的結果,並在視窗上做即時的擬真繪圖顯示。 |
|
輸出結果之轉換與應用
|
|
- 動畫顯示可轉換成
AVI與VRML2.0兩種格式以便在其他程式播放
- 不同時點的資料可轉出為用定位符號區隔的文字檔以供做其他分析使用
- 自動負載轉換工具
(Automated Load Transfer,簡稱ALT)可將包括慣性力之所有負載轉換給有限元素分析軟體以分析零件是否會在運動過程中損壞
|
|  Working Model 國內外已應用之領域: Working Model 國內外已應用之領域:
| · 機構模擬 |
· 產品分析 |
| · 結構分析 |
· 機構最佳化 |
Working Model 國內外大專院校已開之課程:
| ·
機動學 |
·
應力學 |
| ·
動力學 |
·
材料力學 |
| ·
系統模擬學 |
|
Working Model 國內已出版之著作:(可作教科書)
電腦輔助機構設計模擬-------Working Model之建構與範例
作者:長庚大學機械工程系
李明義 教授,系主任兼所長
|
Working
Model中文使用手冊 ------編譯中 1/2![55[1].gif (3294 bytes)](../_borders/551.gif) |
詳細內容 

(中文資料 ) |