 |
การใช้งานไมโครคอนโทรลเลอร์ MCS-51
ไมโครคอนโทรลเลอร์ MCS-51 เป็นไมโครคอนโทรลเลอร์ขนาด 8 บิตที่มีอุปกรณ์สนับสนุนประกอบอยู่ภายในหลายอย่างได้แก่ หน่วยความจำสำหรับเก็บข้อมูล หน่วยความจำสำหรับเก็บโปรแกรม ตัวตั้งเวลา/ตัวนับ อุปกรณ์รับส่งข้อมูลแบบอนุกรม เนื่องจากโครงสร้างของไมโครคอนโทรลเลอร์มีอุปกรณ์สนับสนุนประกอบอยู่ภายในนี้เอง ทำให้การใช้งานง่ายขึ้นและมีประสิทธิภาพมากขึ้นโดยไม่ต้องมีการเชื่อมต่ออุปกรณ์ภายนอกเพิ่มเติมมากเหมือนกับ ตัวไมโคร-โปรเซสเซอร์ทั่วไป นอกจากนี้หากเราต้องการใช้งานไมโครคอนโทรลเลอร์ร่วมกับ อุปกรณ์อื่นเพิ่มเติมเช่น ไอซี 8255 หรือหน่วยความจำภายนอก เรายังสามารถนำมาเชื่อมต่อเพิ่มเติมเข้ากับไมโครคอนโทรลเลอร์ได้อีกด้วย
1. โครงสร้างภายในของไมโครคอนโทรลเลอร์ MCS-51
โครงสร้างภายในพื้นฐานของไมโครคอนโทรลเลอร์ MCS-51 แสดงในรูปที่ 1.1 ประกอบด้วยอุปกรณ์ต่างๆ ดังนี้
-หน่วยประมวลผลกลางขนาด 8 บิต
-หน่วยประมวลผลสำหรับข้อมูลแบบบิต (BOOLEAN PROCRSSOR)
-ความสามารถในการอ้างตำแหน่งของหน่วยความจำโปรแกรม 64 กิโลไบต์
-ความสามารถในการอ้างตำแหน่งของหน่วยความจำข้อมูล 64 กิโลไบต์
-หน่วยความจำโปรแกรมภายในขนาด 4 กิโลไบต์ แบบ อีพรอม (เบอร์ 8451)
-หน่วยความจำแบบ แรม ภายในจำนวน 128 ไบต์
-พอร์ตอินพุต/เอาต์พุตแบบขนานจำนวน 32 เส้น ซึ่งสามารถแยกทำงานได้อย่างอิสระ
-วงจรนับ/จับเวลาขนาด 16 บิต จำนวนสองวงจร
-วงจรสื่อสารแบบอนุกรมแบบดูเพล็กเต็ม(FULL DUPLEX)
-วงจรควบคุมการอินเตอร์รัปต์จากแหล่งกำเนิดสัญญาณ 6 ประเภท พร้อมการกำหนด ลำดับ
-วงจรผลิตสัญญาณนาฬิกาภายในซึ่งโครงสร้างการทำงานทั้งหมดของไมโครคอน-
โทรลเลอร์จะอาศัยหลักการทำงานที่เกี่ยวข้องกัน โดยอาศัยหลักการทำงานที่เป็นไป
ตามโครงสร้างเสมอ
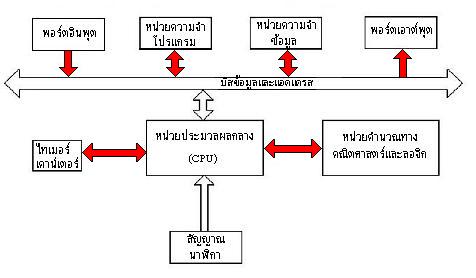
รูปที่ 1.1 แสดงโครงสร้างภายในของไมโครคอนโทรลเลอร์ MCS-51
โดยมากแล้วไมโครคอนโทรลเลอร์ตระกูลนี้มักจะมีรูปร่างของไอซีเป็นแบบขนาด 40 ขา ดังแสดงในรูปที่ 1.2 ซึ่งแต่ละขาสัญญาณจะมีหน้าที่ที่ระบุชัดเจนตามสัญลักษณ์ชื่อย่อ
ที่กำกับในแต่ละขา อย่างไรก็ตามจะมีบางขาสัญญาณที่อาจจะมีหน้าที่ได้มากกว่าหนึ่งอย่าง (ซึ่งเขียนกำกับไว้ว่า ALTERNATE FUNCTION ในรูปที่ 1.2) ซึ่งจะไม่สามารถใช้งานในเวลาเดียวกันได้
ตัวอย่างเช่นขาสัญญาณบิต 0 ของพอร์ต 3 (ใช้ตัวย่อเป็น P3.0) อาจจะใช้เป็นขาสัญญาณเอาต์พุต หรืออินพุตตามปกติ
ภายในไมโครคอนโทรลเลอร์ MCS-51 ซึ่งประกอบด้วยหน่วยการทำงานต่างๆ ภายในไอซีMCS-51 จำนวนมาก โดยแต่ละบล็อกซึ่งเป็นวงจรควบคุมรีจิสเตอร์ (REGISTER)
หรือหน่วยความจำภายในของไอซี MCS-51 จะถูกเชื่อมต่อเข้าด้วยกันผ่านทางเส้นสัญญาณที่เรียกว่าบัสข้อมูลภายใน รีจิสเตอร์และหน่วยความจำเหล่านี้จะถูกนำไปใช้ระหว่างการประมวลผลคำสั่ง
หน้าที่ของโปรแกรมที่ผู้ใช้สร้างขึ้นมาก็เป็นการควบคุมการรับหรือส่งข้อมูลระหว่างรีจิสเตอร์เหล่านี้ ซึ่งอาจจะมีการดำเนินการร่วมกับหน่วยการดำเนินงานประมวลผลทางคณิตศาสตร์และลอจิก
หรือเรียกว่าARITHMATIC AND LOGIC UNIT :ALU
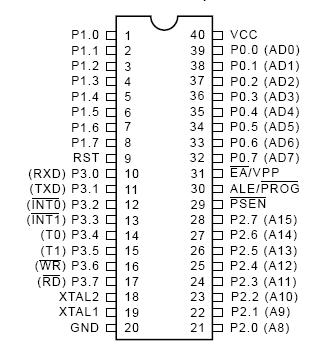
รูปที่ 1.2 แสดงรูปร่างและการจัดวางขาต่างๆ ของไมโครคอนโครลเลอร์ MCS-51
2. โครงสร้างหน่วยความจำภายในไมโครคอนโครลเลอร์ MCS-51
ไมโครคอนโทรลเลอร์ MCS-51 แยกการจัดการหน่วยความจำออกเป็นสองส่วนอย่างชัดเจน คือ หน่วยความจำโปรแกรม (PROGRAM MEMORY) และหน่วยความจำข้อมูล (DATA MEMORY) หน่วยความจำทั้งสองนี้ มีหน้าที่แตกต่างไปจากกัน และใช้วิธีการอ้างแอดเดรสสัญญาณการติดต่อแยกออกจากกัน
2.1. หน่วยความจำโปรแกรม
หน่วยความจำโปรแกรมของไมโครคอนโทรลเลอร์ MCS-51 เป็นบริเวณหน่วยความจำสำหรับเก็บข้อมูลและคำสั่งใช้งานต่างๆ
ซึ่งแม้ว่าจะไม่มีการจ่ายกระแสไฟฟ้าให้กับระบบข้อมูลเหล่านี้ก็ยังคงอยู่ไม่สูญหายโครงสร้างของหน่วยความจำโปรแกรม มีลักษณะเช่นเดียวกับหน่วยความจำที่บรรจุอยู่ในไมโครคอนโทรลเลอร์ MCS-51 ของหน่วยความจำ
ประเภทต่างๆ เช่น หน่วยความจำแบบรอม (READ ONLY MEMORY) หรือ อีพรอม (ERASABLE PROGRAMABLE READ ONLY MEMORY)
ในไมโครคอนโทรลเลอร์ MCS-51 สามารถอ่านข้อมูลหน่วยความจำโปรแกรมนี้ได้สูงสุดไม่เกิน 64 กิโลไบต์ และแยกประเภทของหน่วยความจำโปรแกรมเป็น 2 ลักษณะ
ตามตำแหน่งของหน่วยความจำนั้น คือ หน่วยความจำโปรแกรมภายใน (INTERNAL PROGRAM MEMORY) ซึ่งเป็นหน่วยความจำรอม หรือ อีพรอม
ที่อยู่ภายในตัวไอซีของไมโครคอนโทรลเลอร์เอง และหน่วยความจำโปรแกรมภายนอก (EXTERNAL PROGRAM MEMORY) ซึ่งเป็นการใช้ไอซีหน่วยความจำมาทำหน้าที่เป็นหน่วยความจำโปรแกรมของระบบ

รูปที่ 2.1 แสดงการใช้หน่วยความจำสำหรับเก็บโปรแกรม

รูปที่ 2.2 แสดงการจัดพื้นที่ของหน่วยความจำโปรแกรมภายในและภายนอก
ไมโครคอนโทรลเลอร์เบอร์ต่างๆ ของตระกูล 8051 นี้สามารถขยายให้ใช้งาน ในหน่วยความจำภายนอกได้ทั้งสิ้น โดยกรณีที่มีหน่วยความจำโปรแกรมภายในอยู่แล้ว การอ้างตำแหน่งแอดเดรสที่มีทั้งในหน่วยความจำโปรแกรมภายในและภายนอกนั้นจะต้องทำการควบคุมระดับลอจิกของสัญญาณ ในขณะนั้นด้วย
ขนาดหน่วยความจำโปรแกรมภายในของไมโครคอนโทรลเลอร์เบอร์ต่างๆ ภายในตระกูล 8051 จะแตกต่างกันออกไป เพื่อความเหมาะสมกับการนำไปใช้งานลักษณะต่างๆ เช่น
-8051 และ 8052 มีหน่วยความจำแบบรอม 4 และ 8 กิโลไบต์
-8751 มีหน่วยความจำแบบ อีพรอม ขนาด 4 กิโลไบต์ ข้อมูลที่จัดเก็บภายในนี้ ซึ่งสามารถใช้แสงอุลตร้าไวโอเลตลบและนำกลับไปบรรจุโปรแกรมใหม่ได้อีกครั้งหนึ่ง
-8031 และ 8032 ไม่มีหน่วยความจำโปรแกรมอยู่ภายในตัวไอซี ดังนั้นในการนำไปใช้งานจึงจำเป็นต้องอาศัยหน่วยความจำโปรแกรมภายนอกเสมอ
รูปที่ 2.3 แสดงหน่วยความจำสำหรับเก็บข้อมูลภายในไมโครคอนโทรลเลอร์ MCS-51
2.2. หน่วยความจำข้อมูล
หน่วยความจำข้อมูล (DATA MEMORY) ซึ่งโดยพื้นฐานแล้วเป็นหน่วยความจำแรมสามารถเขียนหรืออ่านข้อมูลได้ (READ OR WRITE MEMORY) ใช้สำหรับเก็บข้อมูลหรือตัวแปร ที่เกิดขึ้นในขณะที่กำลังประมวลผลโปรแกรมไว้เป็นการชั่วคราว ซึ่งโดยพื้นฐานแล้วหน่วยความจำข้อมูลจัดเป็นหน่วยความจำแรมแบบสแตติกดังนั้นเมื่อไม่มีการจ่ายไฟฟ้าให้กับระบบก็จะมีผลทำให้ข้อมูลที่จัดเก็บไว้ภายในหน่วยความจำนี้สูญไป พื้นที่ของหน่วยความจำข้อมูลของไมโคร-คอนโทรลเลอร์ MCS-51 มีได้สูงสุดไม่เกิน 64 กิโลไบต์ และแยกประเภทออกเป็นสองลักษณะตามตำแหน่งที่ตั้งของหน่วยความจำนั้น ตามลักษณะของหน่วยความจำโปรแกรมภายในซึ่งก็เป็นแรมที่อยู่ภายในตัวไอซีในตระกูลของไมโครคอนโทรลเลอร์ และหน่วยความจำข้อมูลภายนอกซึ่งเป็นการใช้ไอซีหน่วยความจำแรมมาเพิ่มเติมเข้าไปในวงจรลักษณะเดียวกับ การนำไอซีอีพรอมมาใช้งานเป็นหน่วยความจำโปรแกรมนั่นเอง
รูปที่ 2.1 แสดงการจัดหน่วยความจำข้อมูล
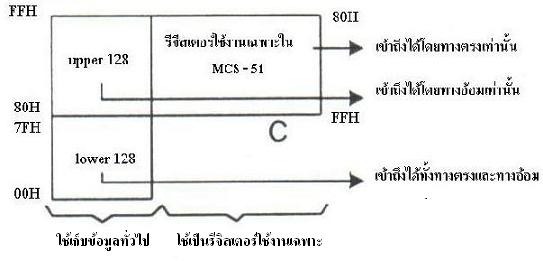
โดยที่หน่วยความจำสำหรับเก็บข้อมูลของไมโครคอนโทรลเลอร์ MCS-51 นี้สามารถแบ่งออกเป็น 2 ส่วนคือ ในส่วนที่เป็นหน่วยความจำสำหรับเก็บข้อมูลภายในไอซี
และหน่วยความจำสำหรับเก็บข้อมูลภายนอกไมโครคอนโทรลเลอร์ MCS-51 ทุกๆ เบอร์จะมีหน่วยความจำเก็บข้อมูลทั่วๆ ไปภายในไอซีอย่างน้อยคือ 128 ไบต์ ไปจนถึง 256 ไบต์ทั้งนี้
ขึ้นกับเบอร์ของไอซี หน่วยความจำสำหรับเก็บ ข้อมูลภายในไอซีในบริเวณ 128 ไบต์เรียกว่า LOWER 128 และในบริเวณ 128 ไบต์หลัง ที่มีเพิ่มในบางเบอร์มีชื่อเรียกว่า UPPER 128 แสดงดังรูปที่ 2.2
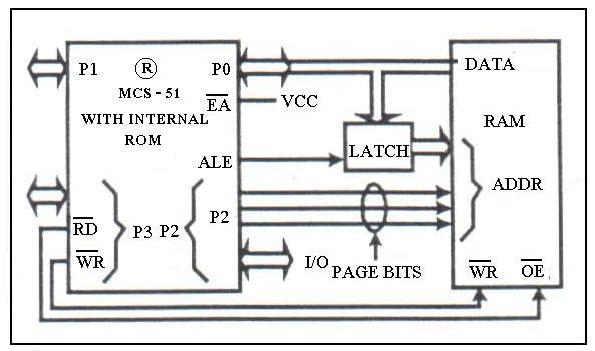
รูปที่ 2.2 แสดงการต่อกับหน่วยความจำข้อมูลภายนอกไอซี
3. รีจิสเตอร์ที่เกี่ยวกับไมโครคอนโทรลเลอร์ MCS-51
รีจิสเตอร์ในกลุ่มนี้จะเป็นรีจิสเตอร์ขนาด 16บิตที่ใช้งานเพื่อเก็บข้อมูลของตัวแอดเดรสเป็นสำคัญโดยค่าที่อยู่ภายในแอดเดรสนี้จะนำไปเป็นค่าของข้อมูลที่ส่งออกไปทางบัสแอดเดรส ในส่วนของไมโครคอนโทรลเลอร์ เพื่อบอกตำแหน่งที่ต้องการติดต่อ รีจิสเตอร์ที่จัดในกลุ่มนี้ประกอบด้วย
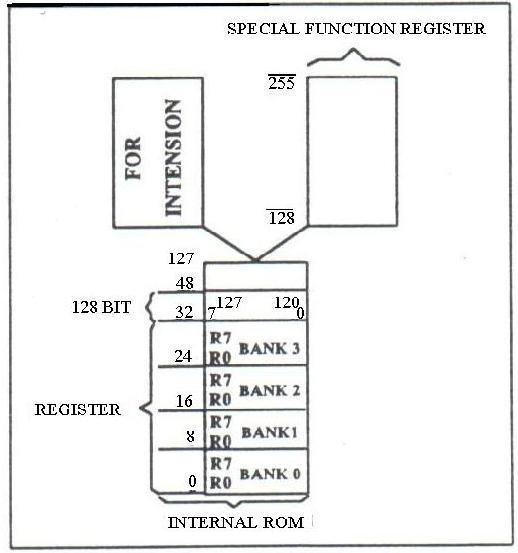
-รีจิสเตอร์ใช้งานทั่วไป (GENERAL-PURPUSE REGISTERS) รีจิสเตอร์ในกลุ่มนี้จัดเป็นพื้นที่หน่วยความจำที่ใช้ในการสนับสนุนในการประมวลผล การทำงานจากหน่วยประมวลผลทางคณิตศาสตร์และลอจิก (ALU) เพื่อให้สามารถจัดการข้อมูลให้เร็วที่สุด นอกจากนี้โปรแกรมที่ไม่ได้ใช้คำสั่งเหล่านี้ก็ยังใช้เป็นการเก็บข้อมูลตัวแปรภายในโปรแกรม จะเห็นได้ว่าชื่อของรีจิสเตอร์ไม่ว่าจะอยู่ในรีจิสเตอร์แบงก์ใด ก็จะมีชื่อว่า R0 ถึง R7 เหมือนกันทั้งสิ้น ดังนั้นในการใช้งานผู้ใช้จะต้องให้ความระมัดระวังว่า ต้องการรีจิสเตอร์นั้นๆ จากแบงก์ใดๆ ซึ่งการกำหนดเลือกแต่ละกลุ่มของรีจิสเตอร์นี้ก็ทำได้ง่าย เพียงการกำหนดค่าของบิตที่อยู่ภายในแฟลก (PSW) เท่านั้นอย่างไรก็ตามโดยทั่วไปก็มักจะมีการใช้งานรีจิสเตอร์ R0 ถึง R7 เฉพาะในแบงก์ 0 เท่านั้น ดังนั้นพื้นที่ของแบงก์อื่นๆ ที่เหลือก็สามารถนำมาใช้ในลักษณะของหน่วยความจำแรม

รูปที่ 3.1 แสดงการเลือกใช้รีจิสเตอร์ใช้งานทั่วไป R0-R7 ในแต่ละกลุ่ม
-รีจิสเตอร์หน้าที่พิเศษ เป็นรีจิสเตอร์หน้าที่พิเศษ (SFR) เป็นรีจิสเตอร์สำหรับ การควบคุมหน้าที่ และการทำงานของอุปกรณ์หรือพอร์ตของไมโครคอนโทรลเลอร์ MCS-51
ทั้งหมด ตำแหน่งของรีจิสเตอร์เหล่านี้จะจัดอยู่ในบริเวณแอดเดรส 80H - FFH การใช้งานรีจิสเตอร์หน้าที่พิเศษเหล่านี้สามารถทำได้ทั้งการระบุชื่อของรีจิสเตอร์ หรือตำแหน่งแอดเดรส
ที่เป็นของรีจิสเตอร์นั้นก็ได้ การจัดพื้นที่หน่วยความจำสำหรับรีจิสเตอร์หน้าที่พิเศษเหล่านี้ โดยมีข้อสังเกตว่ารีจิสเตอร์ที่อยู่ในตำแหน่งแอดเดรสที่มีจำนวนเป็นทวีคูณของค่า 8
จะสามารถอ้างถึงในระดับบิตได้ด้วย (นั่นคือแอดเดรส 80H 88H 90H A0H A8H B0H B8H D0H E0H และ F0H)
-แอกคิวมูเลเตอร์ (ACCUMULATOR) หรือ ACC เป็นรีจิสเตอร์ขนาด 8 บิต ทำหน้าที่ในการเก็บข้อมูลที่จะส่งให้กับหน่วยทำงานภายในหน่วยประมวลผลกลาง
และเก็บผลลัพธ์ที่ได้จากการทำงานเท่านั้น การทำงานของรีจิสเตอร์นั้มีลักษณะเช่นเดียวกับตัวแอกคิวมูเลเตอร์ของโปรเซส-เซอร์ทั่วไป การใช้งานในโปรแกรมซึ่งใช้เรียกเป็น รีจิสเตอร์ A
4 ชุดคำสั่งของไมโครคอนโทรลเลอร์ MCS-51
อ่านรายละเอียดของชุดคำสั่งของไมโครคอนโทรลเลอร์ MCS-51
ไมโครคอนโทรลเลอร์ MCS-51 ประกอบด้วยคำสั่งทั้งหมดจำนวนมาก ซึ่งนำมาแสดงไว้ในตารางของชุดคำสั่งต่างๆ ซึ่งสามารถจะจัดกลุ่มคำสั่งเหล่านี้ตามลักษณะและหน้าที่การทำงานที่คล้ายคลึงกัน เพื่อความสะดวกต่อการศึกษา ทำความเข้าใจและใช้งาน ดังนี้
- 1. กลุ่มการถ่ายเทข้อมูล คือ กลุ่มคำสั่งในการโอนย้ายข้อมูล ทำหน้าที่ในโอนย้ายข้อมูลระหว่างรีจิสเตอร์ หรือหน่วยความจำภายในแรม โดยมีรายละเอียดดังนี้
ชุดคำสั่งในการถ่ายเทแรม ภายในนั้น แสดงดังตารางที่ 2.4 ซึ่งเวลาที่ใช้ในหนึ่งคำสั่งนั้น จะเป็นเวลาเมื่อขณะที่ความถี่ในการทำงานของหน่วยประมวลผลกลาง
ที่ความถี่ 12 เมกะเฮิรตซ์ และรายละเอียดของแต่ละคำสั่งมีดังนี้
MOV :จะทำงานในลักษณะเป็นการถ่ายเทข้อมูลที่มีขนาดเป็นไบต์ หรือ บิตก็ได้ จากแหล่งกำเนิดเข้าสู่ตัวรับข้อมูลในฟิลด์โอเปอร์แรนด์
PUSH:จะทำงานโดยเพิ่มค่ารีจิสเตอร์ SP ก่อนแล้วจึงทำการถ่ายเทข้อมูล 1 ไบต์จากแหล่งกำเนิดไปบริเวณสแต็กตามตำแหน่งที่รีจิสเตอร์ SP กำหนด
POP:การถ่ายเทข้อมูลขนาด 1 ไบต์จากบริเวณตำแหน่งที่รีจิสเตอร์ SP กำหนดไปยังรีจิสเตอร์ที่โอเปอร์แรนด์ กำหนดและหลังจากนั้นรีจิสเตอร์ SP จะลดค่าลง
XCH:คำสั่งแลกเปลี่ยนไบต์ระหว่างแหล่งกำเนิดโอเปอร์แรนด์กับรีจิสเตอร์ AXCHD คำสั่งในการแลกเปลี่ยนขนาดนิบเบิลทางอันดับต่ำของแหล่งกำเนิดโอเปอร์แรนด์กับนิบเบิลอันดับต่ำลงของแอกคิวมูเลเตอร์
ตัวอย่างเช่นทำการเลื่อนข้อมูลไป 2ไบต์ทางขวามือซึ่งจะมี 2 วิธีคือใช้คำสั่ง MOV หรือใช้คำสั่ง XCH
- 2. กลุ่มคำสั่งทางคณิตศาสตร์ เช่น การบวก ลบ คูณ และหารข้อมูลภายในตัว รีจิสเตอร์ต่างๆ ช่วงเวลาการทำงาน ของแต่ละคำสั่งนั้นจะกำหนดที่ความถี่ของสัญญาณนาฬิกาที่ 12 เมกะเฮิรตซ์ คำสั่งทางคณิตศาสตร์ส่วนใหญ่ใช้เวลา 1 ms ยกเว้นคำสั่ง INC DPTR ซึ่งใช้เวลา 2 ms โดยที่คำสั่งการคูณและหารใช้เวลา 4 ms โดยมีรายละเอียดการใช้คำสั่งมีดังนี้
INC:เป็นการบวกหนึ่งกับโอเปอร์แรนด์และใส่ค่าใหม่กลับเข้าที่ตัวโอเปอร์แรนด์นั้นๆ
DEC:เป็นการลบออกจากตัวเลขที่อยู่ในแหล่งกำเนิดโอเปอร์แรนด์ และนำผลลัพธ์ที่ได้มาเก็บไว้ที่ตัวโอเปอร์แรนด์นั้น
ADD:เป็นการบวกในแอกคิวมูเลเตอร์เข้ากับค่าในแหล่งกำเนิดโอเปอร์แรนด์
ADDC:เป็นการบวกค่าต่างๆ ในแอกคิวมูเลเตอร์เข้ากับค่าในแหล่งกำเนิดโอเปอร์-แรนด์และบวกกับบิตทดด้วย
SUBB:เป็นการนำเลขที่แหล่งกำเนิดโอเปอร์แรนด์ ลบออกจากตัวเลขใน A และนำค่าบิตตัวทดมาลบออกอีกและผลลัพธ์ที่ได้นำมาใส่ลงในแอกคิวมูเลเตอร์ A
MUL:เป็นการคูณแบบไม่คิดตัวเครื่องหมายของตัวเลขที่อยู่ใน แอกคิวมูเลเตอร์กับเลขใน รีจิสเตอร์ B แล้วได้ผลลัพธ์ 2 ไบต์ นำมาเก็บไว้ที่ AB โดย A จะรับอันดับต่ำส่วน B จะรับอันดับสูง
DIV:เป็นคำสั่งในการหารแบบไม่คิดเครื่องหมายที่อยู่ในแอกคิวมูเลเตอร์แล้วหารตัวเลขในรีจิสเตอร์ B แล้วนำผลลัพธ์ไปเก็บในแอกคิวมูเลเตอร์และเศษของการหารตัวเลข จะเก็บไว้ในรีจิสเตอร์ B
DA:สำหรับการบวกกันทางตัวเลข BCD เป็นการปรับค่ารวม ซึ่งเป็นผลมาจากการบวกกันทางไบนารี่ของระบบตัวเลข BCD ขนาด 2 หลักสองจำนวน การปรับค่าตัวเลขผลรวมด้วยการใช้คำสั่ง DA
จะได้ผลลัพธ์กลับมาที่แอกคิวมูเลเตอร์
- 3. กลุ่มคำสั่งทางตรรกศาสตร์หรือ แบบลอจิก ทำหน้าที่เกี่ยวกับการประมวลผลแบบ ลอจิกต่างๆ เช่น การ AND OR หรือ EX-OR ระหว่างข้อมูลในรีจิสเตอร์ A นั่นเอง โดยมีการใช้คำสั่งดังนี้
CPL:เป็นการใช้คำสั่งกลับค่าหรือคอมพลีเมนต์ ข้อมูลในแอกคิวมูเลเตอร์จะไม่มีผลใดๆ ต่อค่าของแฟลก หรือการอ้างถึงตำแหน่งแอดเดรสนั้นตามบิตนั้นๆ
RL, RLC, RR, RRC, SWAP:ทั้ง 5 คำสั่งนี้เป็นคำสั่งในการทำงานการวนบิตบนตัวของแอกคิวมูเลเตอร์ซึ่ง RL เป็นการวนบิตทางขวา, RLC เป็นการทำการวนทางซ้ายผ่านบิตทด, RRC เป็นการวนขวาผ่านบิตทด และ SWAP เป็นการวนซ้ายสี่ครั้ง
ANL:เป็นการ ADD กันทางตรรกศาสตร์ ระหว่างแหล่งกำเนิดสองโอเปอร์แรนด์ ซึ่งจะสั่งให้ทำงานในรูปแบบของตรรกศาสตร์ทางข้อมูลขนาดเป็นไบต์หรือบิต
- 4. กลุ่มคำสั่งแบบบูลีนหรือแบบบิต ซึ่งเป็นความสามารถของไมโครคอนโทรลเลอร์ MCS-51 ที่จะดำเนินการประมวลผลแบบบิต แทนที่จะเป็นข้อมูลทั้งไบต์เช่นปกติ โดยมีชุดคำสั่งที่จัดการโดยตรง
ทุกคำสั่งจะเข้าถึงข้อมูลโดยตรงในระดับบิต โดยมีการบิตแอดเดรสได้ตั้งแต่ 00H - 7FH ในพื้นที่ 128 บิต หน่วยความจำข้อมูลภายในและบิตแอดเดรส 80H - FFH
ในบริเวณกลุ่มรีจิสเตอร์ฟังก์ชั่นพิเศษ (SFR)
- 5. กลุ่มคำสั่งในการกระโดดไปยังตำแหน่งต่างๆภายในโปรแกรม ซึ่งจะเปลี่ยนลำดับของการประมวลผลภายในโปรแกรมไปยังส่วนต่างๆแทนที่จะดำเนินการไปเป็นลำดับ ต่อเนื่องโดยที่คำสั่ง JMP จะแบ่งเป็น 3 ลักษณะ คือ SJMP, LJMP, AJMP ซึ่งในแต่ละคำสั่ง จะมีข้อแตกต่างของการกระโดดไปยังแอดเดรสไกลสุดที่ต่างกัน คำสั่ง JMP ซึ่งเป็นแบบโมนีชิก ที่สามารถจะใช้ได้โดยมีรายละเอียดการใช้งานของคำสั่งดังต่อไปนี้
SMP:จะเป็นการกระโดดแบบการย้ายอันดับตำแหน่งของแอดเดรสตำแหน่งเดิมซึ่งจะสามารถกระโดดได้ -128 ถึง +127 ไบต์
AJMP:ลักษณะแบบนี้จะสามารถกระโดดได้ไกลสุดประมาณ 2 กิโลไบต์ ซึ่งจะใช้หน่วยความจำเพียง 2 ไบต์เท่านั้นในการกำหนด
LJMP:ลักษณะแบบนี้จะสามารถกระโดดได้ไกลสุดประมาณ 64 กิโลไบต์ ซึ่งจะใช้หน่วยความจำเพียง 3 ไบต์เท่านั้นในการกำหนด
JMP @A+DPTR:เป็นการควบคุมการกระโดดไปยังโปรแกรมที่ต้องการเฉพาะภายในส่วนต่างๆ
5. โครงสร้างการอินเตอร์รัปต์ของไมโครคอนโทรลเลอร์ MCS-51
จากแผนภาพโครงสร้างระบบอินเตอร์รัปต์ของ ไมโครคอนโทรลเลอร์ MCS-51สัญญาณที่เข้ามาทำการอินเตอร์รัปต์ MCS-51
นั้นเกิดขึ้นได้ห้าลักษณะ โดยจะเห็นได้ว่าสามารถที่จะกำหนดเลือกเพื่อยินยอม (หรืออีนาเบิล : ENABLE) และห้าม (หรือดิสเอเบิล : DISABLE)
ไม่ให้มีการอินเตอร์รัปต์แต่ละประเภทได้ โดยการกำหนดบิตของข้อมูลที่เกี่ยวข้องซึ่งมักจะอยู่ภายในรีจิสเตอร์ TCON และ SCON
นอกจากนี้ยังมีตำแหน่งบิตภายในรีจิสเตอร์ IE (INTERRUPT ENABLE REGISTER) ซึ่งทำหน้าที่เสมือนกับเป็นสวิตซ์หลักที่เกี่ยวข้องกับสัญญาณอินเตอร์รัปต์ทั้งหมด
หากว่ากำหนดไม่ให้เกิดการอินเตอร์รัปต์แล้วการกำหนดบิตเพื่อห้ามหรือยินยอมของแต่ละอินเตอร์รัปต์ก็จะไม่มีผลใดๆเกิดขึ้น
ยังแสดงให้เห็นว่าสัญญาณอินเตอร์รัปต์แต่ละประเภทยังสามารถกำหนดระดับความสำคัญ (PRIORITY) ของการอินเตอร์รัปต์ได้สองลักษณะ คือ
ระดับความสำคัญสูงหรือต่ำ (HIGH OR LOW PRIORITY) กล่าวคือขณะที่กำลังประมวลผลอยู่ภายในส่วนของโปรแกรมย่อยบริการอินเตอร์รัปต์ของสัญญาณที่มีระดับความสำคัญต่ำอยู่
ก็อาจจะถูกขัดจังหวะให้ไปประมวลผลของสัญญาณอินเตอร์รัปต์ที่มีระดับความสำคัญสูงกว่า แต่หากว่าเป็นสัญญาณอินเตอร์รัปต์ที่มีระดับความสำคัญต่ำเช่นเดียวกันแล้ว
ก็ต้องรอให้เสร็จสิ้นการประมวลผลที่ ดำเนินการอยู่ก่อน
6. การรีเซต
โดยความหมายของการรีเซตเป็นการบังคับให้มีการเริ่มต้นใหม่อีกครั้งหนึ่ง ซึ่ง มักจะกระทำโดยการกำหนดสภาวะของสัญญาณที่ขารีเซตของไอซี MCS-51
ให้เป็นระดับลอจิก ที่เหมาะสมเท่านั้น การรีเซตด้วยวิธีนี้ถือว่าเป็นการอินเตอร์รัปต์อย่างหนึ่งได้ แต่จะมีลักษณะต่างออกไปจากการอินเตอร์รัปต์ของสัญญาณนี้ได้
ซึ่งมีศัพท์เฉพาะเรียกว่า NON-MASKABLE INTERRUPT นอกจากนี้การดำเนินการของโปรแกรมก็แตกต่างออกไปด้วย
โดยจะไม่มีการเก็บค่าของคำสั่งที่กำลังจะไปทำในลำดับต่อไปภายในรีจิสเตอร์ PC เมื่อมีการรีเซตเกิดขึ้นโปรแกรม จะถูกสั่งให้กระโดดไปยังแอดเดรส 0000 ทันที
ซึ่งตำแหน่งนี้จะเป็นตำแหน่งเริ่มต้นของการทำงานของไมโคร-คอนโทรลเลอร์ MCS-51 เมื่อเริ่มจ่ายไฟให้กับระบบเมื่อใดก็ตามที่มีการรีเซตเกิดขึ้นค่าสภาวะต่างๆ
ภายในไมโครคอนโทรลเลอร์จะถูกกำหนดกลับไปเป็นค่าเริ่มต้นใหม่อีกครั้ง
|
|
