Suzy
Page #3
Page One:
Page Two:
Page Four:
Page Five:
Page Six: PolyCarb
Mini-Sumo 'Bots
Suzy's Brother
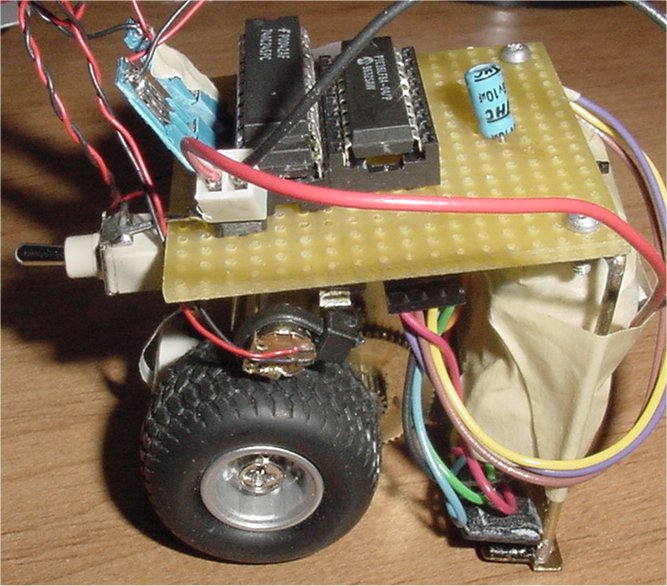
Solarbotics Pagermotor 'bot
(Pushy)
Exploded
Axle Views:
Movie:
344K MPG
Shows pushing a roll of paper tape that weighs
3.5oz. on kitchen table.
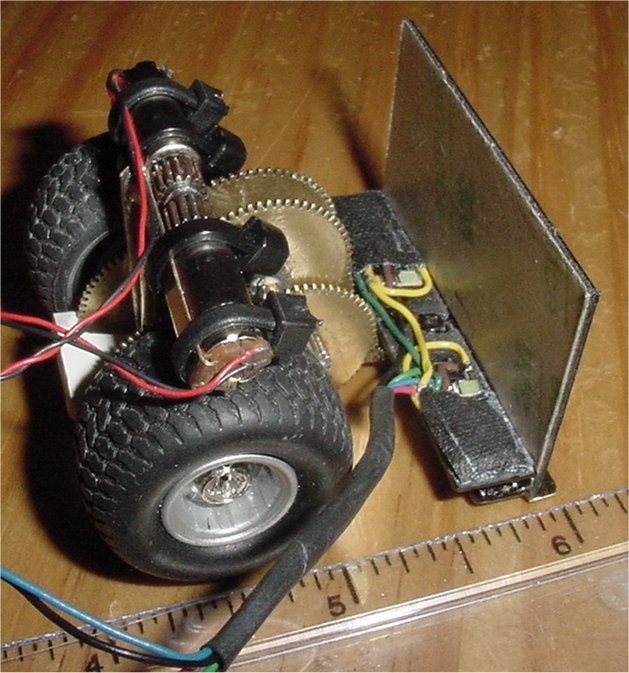
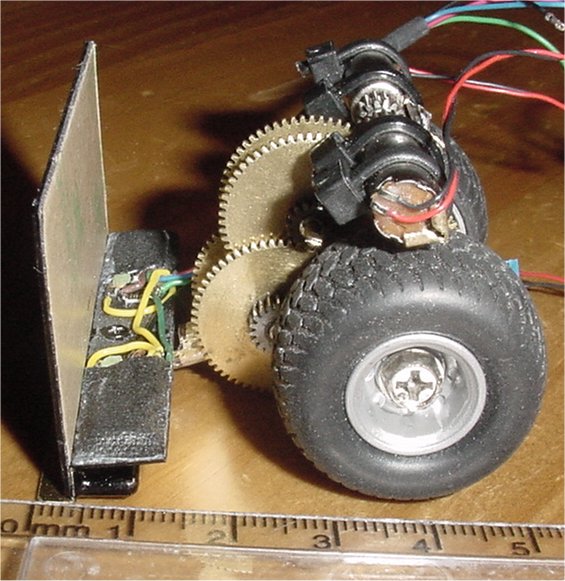
Right Side View:
Shows the front edge detector assembly (covered with black tape).
The base of it is a black plastic that has sticky on one side.
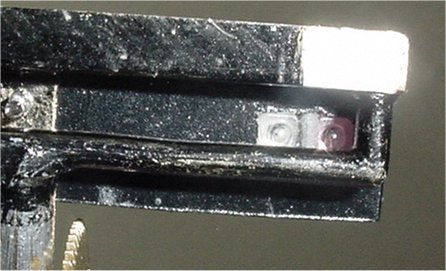
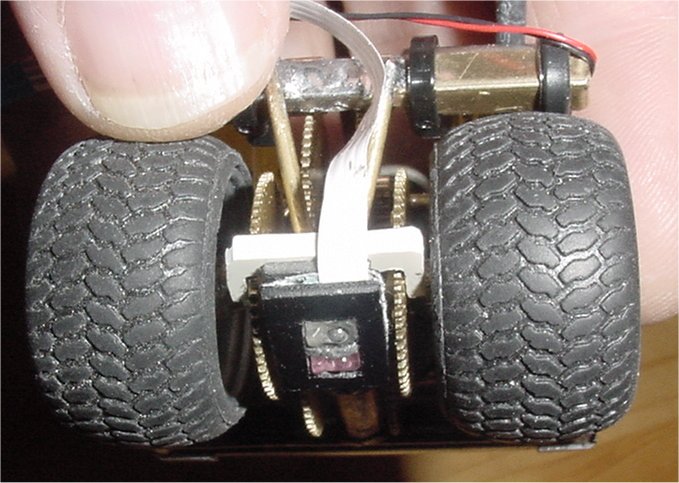
Sensor Assembly:
Pair of LED & photo-transistor glued together
with a black double-sticky tape.
This isolates each part. Then that module was stuck
down to the plastic with the parts
showing through the pre-cut hole and the rest of
the circuit was soldered in.
LED is pink and on the outside edge while the photo
transistor is clear and on the inside;
and it works at 3-6mm.
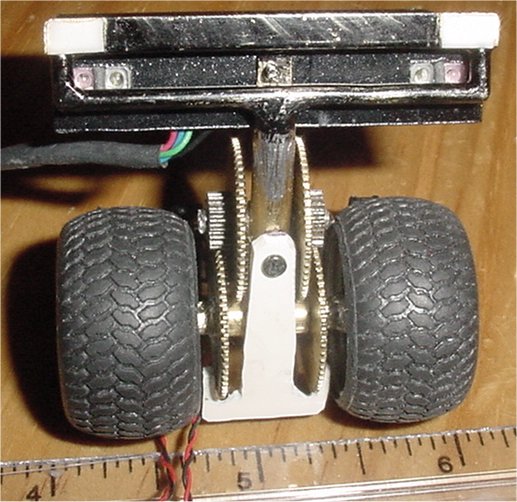
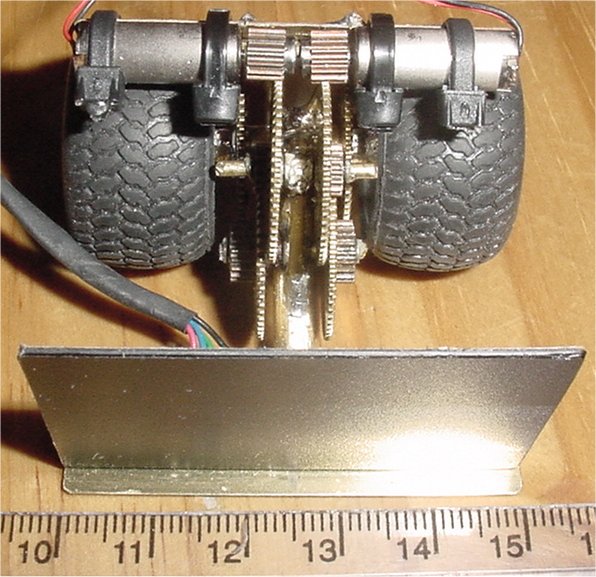
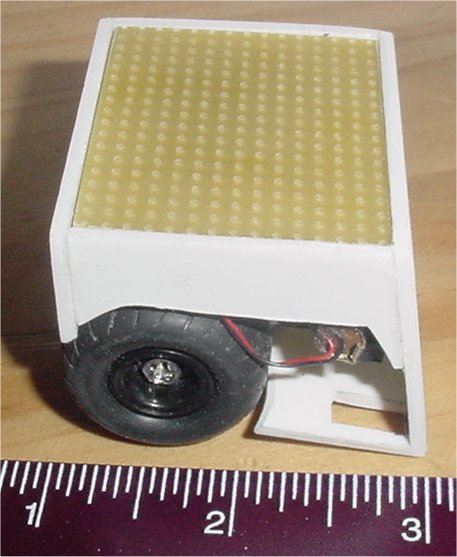
Bottom View:
The front sensors are boxed in with brass and black-marker pen.
The white pieces on the front scoop are mouse glide strips from the
bottom of a mouse.
Side measurement with inches.
Measurements in cm's.
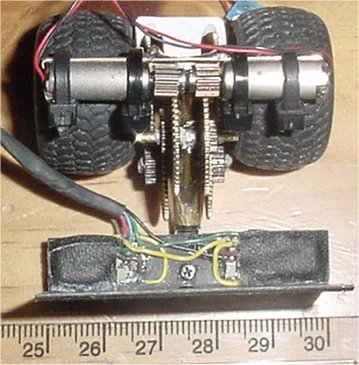
Here's that ruler with cm's.
There's still room for a rear single edge sensor. Also room for batteries
& MCU.
Not assembled yet: distance sensors, front & rear.
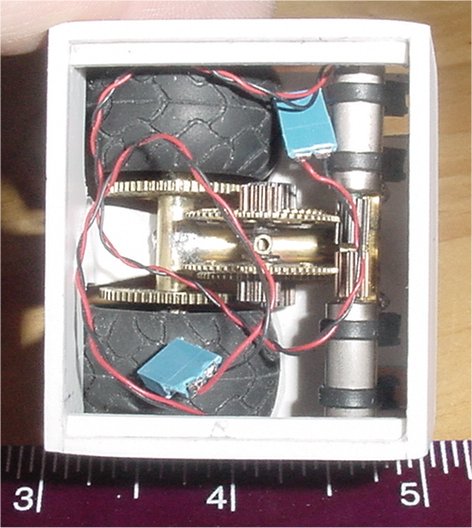
Rear Sensor:
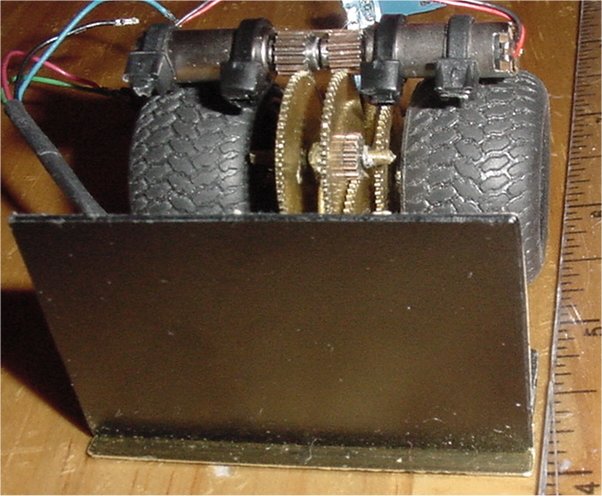
Exploded Rear Wheel+Axle Views:
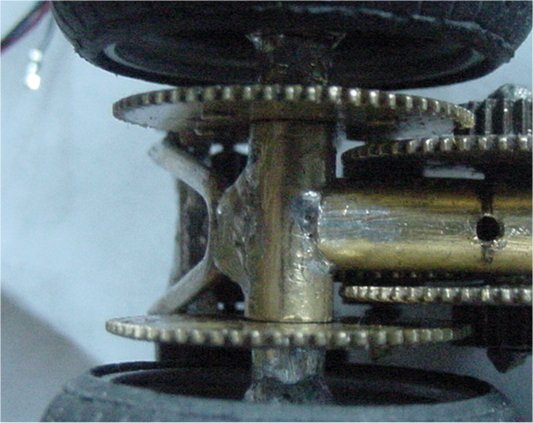
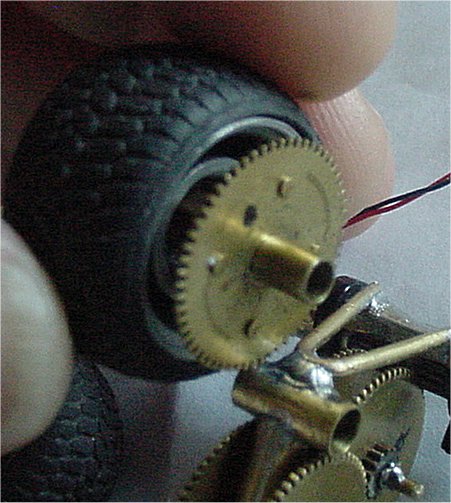
Right
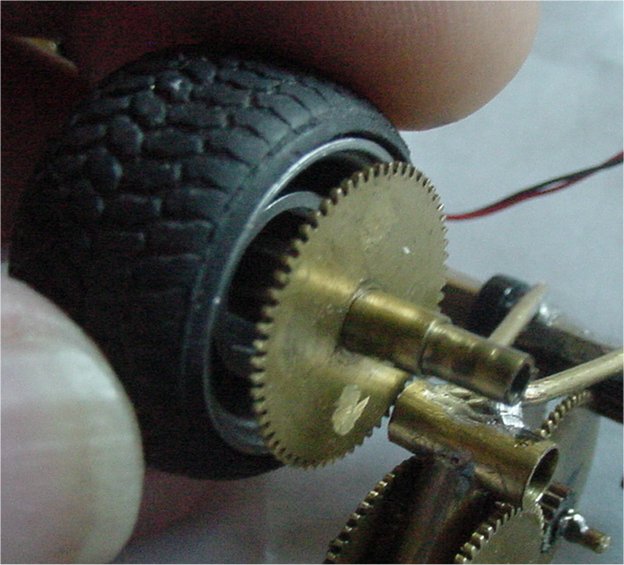
Left
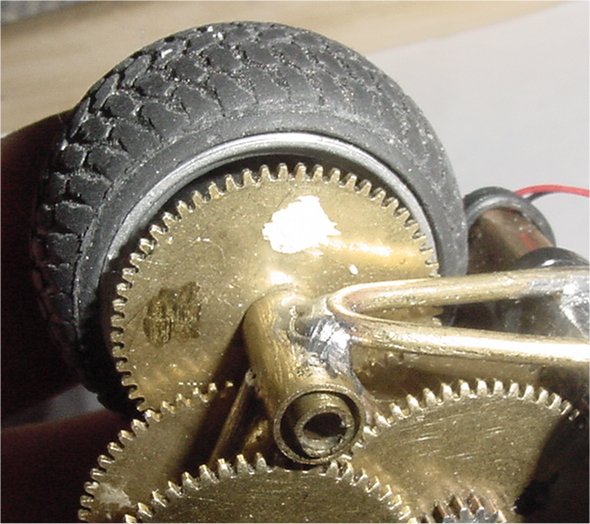
Left before right inserted.
Bearings? What, you're supposed to use bearings?
As running...3.5oz weight, slightly heavy.
Bottom connector goes to front and rear sensors.
3V lithium batteries, too heavy.
---
Even with those batteries, it still occasionally pulls a wheelie big
enough to flip on it's backside.
Hmmm, add a back sensor and run around tipped up.
Wanted: More of these "ZipZap" (R) batteries...
Left one is from the car while the right one is from the truck.
Haven't tried them as yet but will soon. These packs charge in 60 seconds
from the ZipZap controller.
4.8V should work fine.

'bro
Already boxed and has cutouts for front line sensors.
This one is 60:1 with the motors placed forward giving lower profile.
---
This is my first experience at cutting up & gluing 2mm white sintra.

Were you see the bottom. Unfinished circuit board to the left.
I will probably paint the line sensor holes black to keep down unwanted
reflections.
Plan to use those mouse double-sensors turned 90 degrees.
This could give input to the direction moved, going across that white
line.
---
Peter, this one's for you; now using old guitar strings to hold the
wheels on.
Bearings? Oh foo, forgot again! Maybe next time, was on a construction
roll.
Still plenty of room for batteries and dual front & single rear
sensors.

And yet another 'bot. This one with Solarbotics GM10's with the black
wheel package.
Body unfinished, needs sanding.
That's 3mm sintra, black. Yes, those are screws holding the back/sides
of the body to the front/bottom panel, 5 in all.
Also, the mice front toes sticking out.
Hey ... Needed to have something to "test against" for practice.

Here you see the mouse toe applied.
Also, the double-input black line sensor with it's companion IR-LED,
removed from that mouse.
This page updated: June 30, 2006
Paul T Barton