State Variable Feedback Controller
The first design I will describe was derived using the State-Variable Feedback (SVFB) technique. The percent overshoot was 4% and settling time was 0.5 sec. The first step is to form the characteristic polynomial ![]()
One may solve for alpha by
a = 5/ts. So to solve for the natural frequency on must first find the damping ratio, z :
![]()
Then follows the natural frequency from:
![]()
Since the characteristic equation of the open loop transfer function above for the ball balancer is fourth order, two non-dominant poles must be convoluted with the characteristic polynomial to have enough poles for Ackermann’s formula. Using s = -15
± j6 as roots the characteristic polynomial becomes:![]()
Now Ackermann’s formula yields the K to simulate the controller:
![]()
The vector K is multiplied by x to solve for the input, u:
![]()
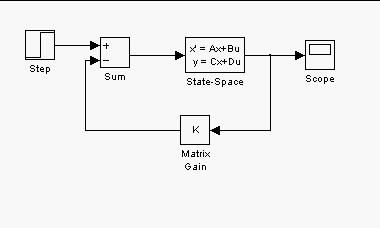
In this project the matlab function acker solves for the vector K given the arguments A, B, and p where A is the system matrix, B is the control input matrix and p is the roots of the characteristic polynomial. The controller stablizes the linear system for a large range of initial values (.01 < x < 10000). Here is the simulink model and matlab code which implements the State-Variable Feedback Design for the ball balancer.
%Project #1
%Ball Balancer
%State Variable Feedback Method
global
A;global
B;global
K;global
m; % mass of ballglobal
g; % gravityglobal
pn; % nominal pointglobal
J; % inertia of the beam
% Set Parameter Values
m=1;
g=9.81;
pn=1;
J=8.81;
%state space matrices
A=[0 1 0 0; 0 0 -g 0; 0 0 0 1; (-m*g)/(m*pn^2+J) 0 0 0];
B=[0; 0; 0; 1/(m*pn^2+J)];
%C=[1 0 0 0; 0 0 1 0];
C=[1 0 1 0];
D=[0];
[num,den] = ss2tf(A,B,C,D);
[numc,denc] = cloop(num,den);
%Ackerman Method
POV = 4;
ts = 0.5;
alpha = 5/ts;
zeta = 0.716;
wn = alpha/zeta;
deltaD= [1 2*alpha wn^2];
%p = roots(deltaD)
%[Q,R]= deconv(denc,deltaD);
Q = [1 30 261];
% s = -15 +/- j6deltaC = conv(deltaD,Q);
p = roots(deltaC);
K = acker(A,B,p);
% check the design by computing closed loop poles
Ac = A-B*K;
[numC,denC] = ss2tf(Ac,B,C,D);
% see if denC and deltaC are the same to check design
[numc,denc]=cloop(numC,denC,-1);
t=[0:0.01:5];
y=step(numc,denc,t);
%k=[-100:0.5:0];
%subplot(3,1,1)
%rlocus(Ac,B,C,D);
%subplot(3,1,2)
%plot(t,y);
xo = [.01 .01 .01 .01];
[t,x] = ode23(
'nonlinear', t, xo);%subplot(3,2,1)
plot(t,x);
title(
'State Variable Feedback Response To Linearized System');xlabel(
'time');ylabel(
'p, pdot, theta, theta dot');
% Project #1 (define nonlinear eqs)
function
xdot = nonlinear(t,x);
global
A;global
B;global
K;global
m;global
g;global
pn;global
J;
u = -K*x;
%xdot(1) = x(2);
%xdot(2) = x(1)*(x(4)^2) - g*sin(x(3));
%xdot(3) = x(4);
%xdot(4) = (-2*m*x(1)*x(2)*x(3) - m*g*x(1)*cos(x(3) + u))/(m*(x(1)^2) + J);
%xdot = [xdot(1) ; xdot(2); xdot(3) ; xdot(4)];
xdot = A*x+B*u;
Now I use the nonlinear equations to simulate the controller against a realistic system. The controller stabilizes the system for initial values
£ .01.% Project #1 (define nonlinear eqs)
function
xdot = nonlinear(t,x);
global
A;global
B;global
K;global
m;global
g;global
pn;global
J;
u = -K*x;
xdot(1) = x(2);
xdot(2) = x(1)*(x(4)^2) - g*sin(x(3));
xdot(3) = x(4);
xdot(4) = (-2*m*x(1)*x(2)*x(3) - m*g*x(1)*cos(x(3) + u))/(m*(x(1)^2) + J);
xdot = [xdot(1) ; xdot(2); xdot(3) ; xdot(4)];
%xdot = A*x+B*u;
Click here to return to project home page
Linearize Non-linear Equations
State Variable Feedback Controller