|
Industrial Software |
| Home | Industrial Software | Golden eye | Clouds | Robot vision | Aims | Icons | SPOT | CV | Pictures | Contact |
|
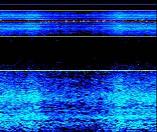
...this is just shot from several projects and I do not pretend this page is completed and perfect. Whit experience in image processing, vision, robot control, data transmission, data evaluation and programming in several computer languages I probably can capture your interest. I have been exposed in scientific research and industrial environments, which helps me to create multidisciplinary skills in support,systems architectures, development stages, testing,documentation, exploration, project management and consultansy. You can see some examples below: Heroic robot uses non-destructive detection and evaluation of concrete structure. One of the measurement is sound spectroscopy. I was involved in software development and data evaluation of these signals.
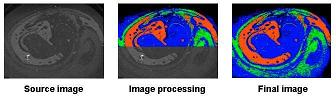
AIMS project (rust recognition image processing neural network system).This system remutely tests metalic constructions for corrosion.
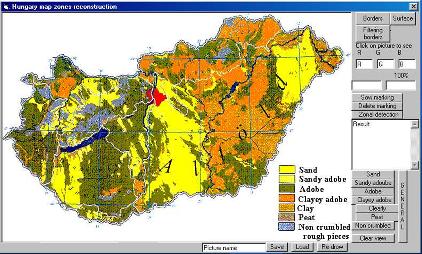
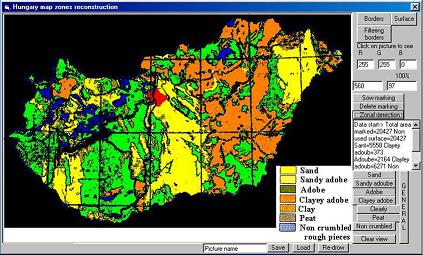
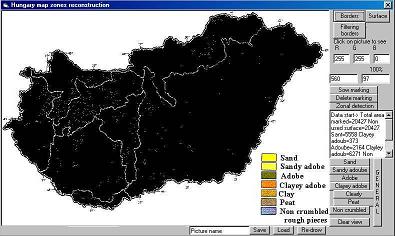
GIS system for filtering different geographical areas (river tracking system). This software has capability from map to classify regions based on water supply. Also we can separate the regions by colour from the map.
The 'Robot vision' project involves vision principles to control robot assembling operation
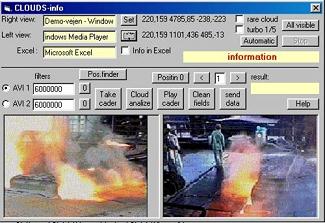
'Clouds' software uses bi-focal view system to recognise volume of the gases evaporated from liquid metal in AGA steel company- Austria.
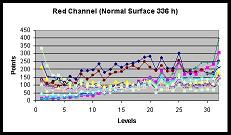
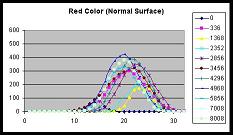
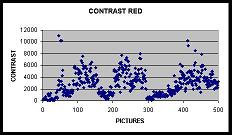
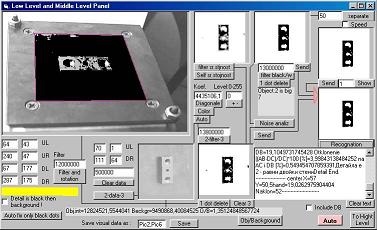
'Golden EYE' project uses vision to recognise floating oil in/on water surface and transfers and evaluates the data.
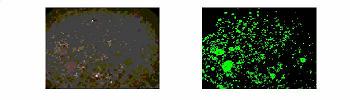
'UV vision' can recognise evaporation gases from fuel (right picture) using UV camera and UV laser as source.
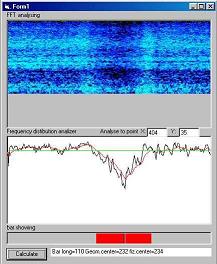
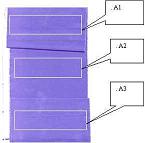
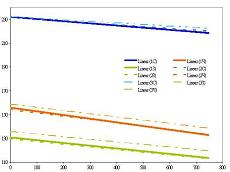
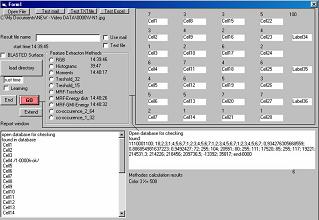
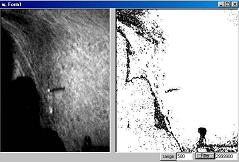
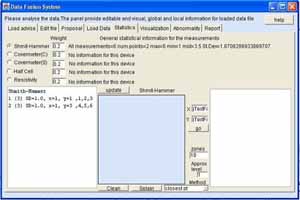
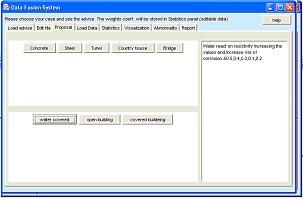
System for automation of concrete repairing by signals data fusion. This system performs data fusion from several detectors and creates picture for concrete surface. Using that information we can build decision for surface repairing.
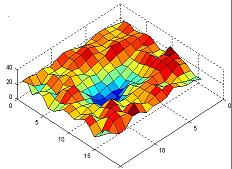
Different approximation algorithms (specially developed) were used for different surface's views. These views are based on data fusion from random points measurements on the surface rather than mesh measurements.
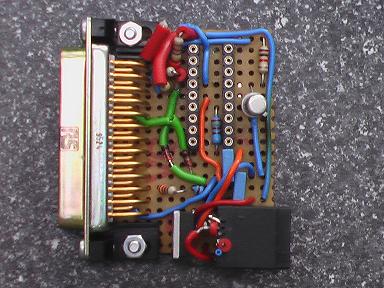
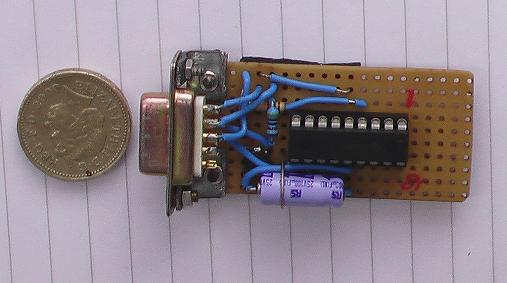
Some of my projects required PIC processors programming using Assembler language. I would like to present here two small programmers which I created for this purpose. The circuits' developments are not mine. I just found them in internet. The first one uses the parallel port. You can find it under name 'noop'- very famous programmer. The second which I personally prefer because it does not require external power uses the serial port. You can find the circuit under the name 'COM84'.
|